Wichtig ist, um spätere Probleme zu vermeiden, in einem festen Einheitensystem zu arbeiten. In dere folgenden Tabelle sind die im Bauingenieurwesen sinnvollen Einheitensysteme angegeben:
Die Masse ergibt sich aus der Gewichtskraft der Masse nach Division durch die Erdbeschleunigung g=9,81m/s:
Alle Eingabegrößen müssen also in einem System angegeben werden, d.h. z.B. die Längen in m, Querschnittswerte z.B. in m^2 oder m^4, der Elastizitätsmodul in kN/m^2, die Massen in kN,m und sec, d.h. in to (siehe Tabelle) etc.
Die Gewichtskraft der Masse ist das Gewicht (Eigengewicht, Stoffgewicht) mit dem üblicherweise in der Statik gearbeitet wird, z.B. in N, kN, MN etc. oder kN/m^3, oder kN/m^2 etc. Wichtig ist es bei der Umrechnung in die Masse, die richtigen Werte für die Erdbeschleunigung einzugeben. Bei Verwendung des kN,m,s Systems reicht es (in unseren Breiten), die Gewichte näherungsweise durch 10 zu teilen, um die Masse zu erhalten. Exakt muss durch 9,81 geteilt werden.
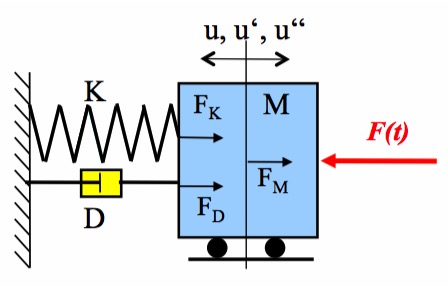
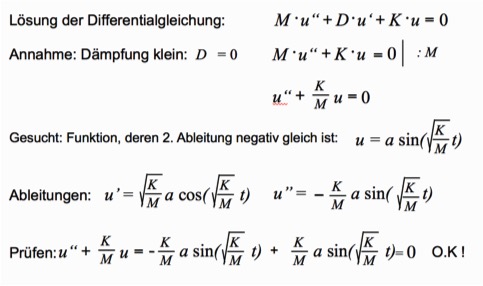
Es ist nützlich, wenn man sich kurz klarmacht, auf welch einfachen Grundlagen die mechanische Schwingungslehre beruht. Hierzu dient das einfache eine Schwingers mit nur einem Freiheitsgrad u, bestehend aus einer Masse, einer Feder und einem Dämpfer. An der Masse greift eine zeitveränderliche Kraft F(t) an:
Wenn sich das Modell bewegen soll, müssen Kräfte wirken. Es ist die Federkraft, die Dämpferkraft,die Massenkraft. Die Masse verschiebt sich um das Maß u, mit dere Geschwindigkeit u‘ und der Beschleunigung u“:
Die Federkraft Fk ergibt sich aus dem Hooksche Gesetz (Ut tensio sic vis: Wie die Kraft so der Weg, d.h. Proportionalität). Faktor k ist die Steifigkeit in kN/m.
Die Dämpferkraft Fd ist proportional zur Geschwindigkeit u‘, eine Tatsache, die man beim Stoßdämpfertest am Auto ausnützt. D ist die Dämpferkonstante mit der Dimension [kN/(m/s) = kN s/m].
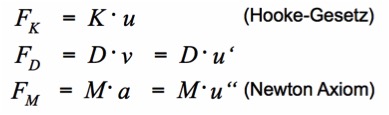
Die Massenkraft Fm entspricht dem Newtonschen Axiom: F=a x m, d.h. Beschleunigung (acceleration) a mal der Masse m. Die Masse muss also die Dimension [kN/(m/s^2)=kN s^2 /m] haben. Diese drei Kräfte widerstehen zu jedem Zeitpunkt der äußeren Kraft F(t), es ergibt sich die Differentialgleichung (DGL) der mechanischen Schwingung.:
Die Differentialgleichung ist in diesem Fall ist also nichts weiter als eine einfache Kräfte-Gleichgewichtsbedingung.
3. Lösung der DGL:
Es ist am einfachsten, wenn man zunächst zwei Sonderfälle betrachtet:
freie Schwingung, d.h. F(t) = 0
erzwungene Schwingung, d.h. F(t) <> 0
3.1 Freie Schwingung:
Im ersten Schritt wird die ohnehin sehr kleine Dämpferkraft vernachlässigt, d.h. Fd = D*u‘ = 0.
Der entscheidende Schritt ist, dass eine Funktion gewählt wird, deren 2. Ableitung gleich der negativen Funktion selbst ist. Solche Funktionen sind z.B. die sin- und cos-Funktionen. Hier wird im ersten Schritt die sin-Funktion gewählt. Es muss hier nicht die Wurzel aus dem Quotienten K/M genommen werden, es geht genauso mit dem Ansatz K/M, der Wurzelausdruck erweist sich lediglich später als bequemer.
Der Formelansatz erfüllt also die Differentialgleichung.
Was bedeuten aber jetzt die Parameter Wurzel(K/M) und der Vorfaktor a?
Die Abkürzung ist die Eigenfrequenz. Sie ist als sog. Kreisfrequenz gegeben. D.h. es wird gezählt, wieviel Bogenlänge je Zeiteinheit beim Einheitskreis überstrichen wird. Dimension ist 1/Sekunde. Im Bauwesen ist das Arbeiten mit der sog. Frequenz üblich. Diese ergibt sich aus der Kreisfrequenz durch Multiplikation mit 2pi. Dimension ist Hertz, kurz Hz. Sie gibt an die Anzahl der Schwingungen pro Sekunde.Wenn der Einheitsvektor einmal umgelaufen ist, hat er die Strecke 2pi überstrichen, dann geht der Prozess von neuem los:
Die Periode und die Frequenz stehen in einem festen Verhältnis zueinander. Die Perioden-Schwingzeit T ergibt sich aus dem Kehrwert der Frequenz in Hertz:
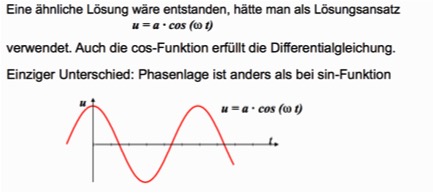
Bei allgemeiner Phasenlage gilt der Ansatz:
Wahl der Funktion hängt ab von den Anfangsbedingungen! Diese sind für die Beurteilung einer harmonischen Schwingung eigentlich ohne Belang. Vollständige Lösung beschreibt beliebige Phasenlage. Wird aber für die Beurteilung von praktischen Problemen in der Regel nicht benötigt!
Im Folgenden wird die Dämpfung berücksichtigt:
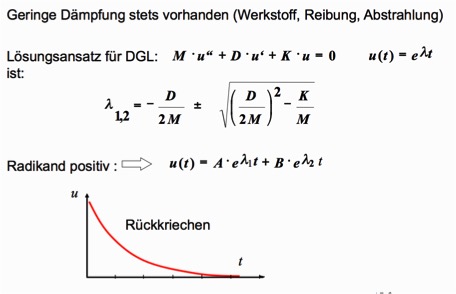
Die Lösung der DGL mit dem Dämpfungsglied gelingt einfach über den sog. Exponentialansatz. Dabei wird eine Funktion u = e^(lambda*t) gewählt.
Differenziert und in die DGL eingesetzt, folgt eine quadratische Gleichung mit einem Wurzelglied, bei dem der Radikant eine Summe darstellt. Je nach Größe und Vorzeichen der Glieder des Radikanten kann die Wurzel reel oder imaginär werden. Deshalb wird der Radikant in diesem Fall auch als Diskriminante (lat. discriminare = unterscheiden) genannt.
Man erkennt, dass bei großer Dämpfung D und kleiner Masse das erste Glied das zweite absolut überragen kann, der Ausdruck ist positiv, die Wurzel ist reell. Als Lösung ergibt sich keine Schwingung mehr, der ausgelenkte SChwinger kriecht in die Null-Lage zurück.
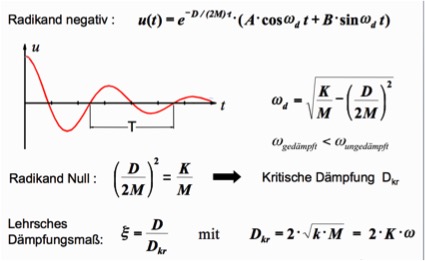
Bei negativem Radikant wird die Wurzel imaginär, d.h. es treten auch imaginäre Lösungsgleichungen auf. Imaginäre Funktionen bestehen aus einem reellen cos-Term und einem imaginären Sinusterm. Anders formuliert: Bei imaginären Lösungen treten Schwingungen auf. Nach einiger Zwischenrechnung ergibt sich der folgende Formelausdruck:
Man erkennt, dass bei negativem Radikanden als Lösung eine Schwingung entsteht, die allerdings gedämpft ist, die e-Funktion als Vorfaktor der trigonometrische Funktionen bewirkt eine stets Abnahme der Amplituden.
Der Wert der Dämpfung D, bei dem der erste Term unter der Wurzel gleich groß wird wie der zweite aber negative – d.h. der Radikand wird gleich Null – ist der Umschlagpunkt des Verhaltens. In diesem Fall wird die Eigenfrequenz omega_d gleich Null, d.h. es gibt keine Schwingung mehr.
Die Dämpfung bei der der Radikand gleich Null wird, wird als kritische Dämpfung bezeichnet, weil jede Erhöhung von D über diesen Punkt hinaus zum Rückkriechen ohne Schwingungen führt, es tritt keine Schwingung mehr auf. Oder anders herum: Jede Verkleinerung unter den kritischen Wert von D führt zu einer Schwingung. Dies macht den Bedeutung des Wortes kritisch vermutlich aus.
Man erkennt auch, dass die Eigenfrequenz omega unter die des ungedämpften Systems absinkt, wenn die Dämpfung größer wird. Anschaulich Der Löffel bewegt sich umso zäher durch den Honigtopf, je steifer der Honig wird, dadurch sinkt die Eigenfrequenz.
Die tatsächliche Dämpfung des Systems, die i.a. sehr viel kleiner ist als die kritische, wird häufig zu dieser ins Verhältnis gesetzt: d.h. ksi=D/Dkrit. Dieses Dämpfungsmaß wird häufig als Lehrsches Dämpfungsmaß bezeichnet. 3.2 Erzwungene Schwingungen
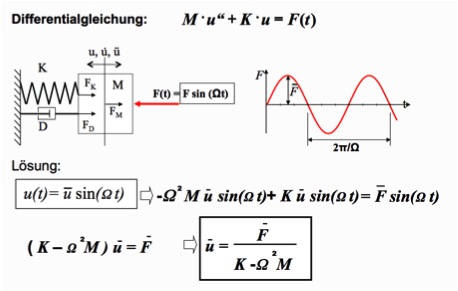
Unter erzwungenen Schwingungen versteht man solche, bei denen – im Gegensatz zur freien Schwingung – eine äußere Kraft beliebigen Zeitverlaufes am Schwinger angreift, F(t) ist also in diesem Falle ungleich Null. Die Lösung der inhomogenen DGL wird einfach, wenn wir voraussetzen, dass die angreifende Kraft einen sinusförmigen Zeitverlauf mit der Frequenz (groß) Omega hat. Groß Omega ist die Erregerfrequenz, klein omega die System-Eigenfrequenz.
Bei einer erzwungenen Schwingung bewegt sich das System genau im Takte der Erregung, d.h. auch die sin- und cos-Terme der linken Gleichungsseite hängen jetzt von groß Omega ab.
Damit ist die Lösung trivial, denn die störenden sinus-Terme kürzen sich auf beiden Seiten heraus, es verbleiben nur die Vorfaktoren, also die Amplituden der einzelnen sin-Terme. Diese lassen sich nach der Unbekannten u auflösen, d.h. nach der gesuchten unbekannten Verschiebung unter einer harmonischen Erregung F.
Die Gleichung lässt sich auch wie folgt formulieren: ,
mit der sog. Vergrößerungsfunktion V. Diese ist die rein statische Verschiebungsamplitude, die man erhalten würde, wenn die Last F(t) rein statisch (also mit einer konstanten Last-Zeitfunktion der Größe F quer) einwirken würde. Der zweite Term wird als sog. Vergrößerungsfunktion definiert.
Bei gedämpften Systemen ändert sich die Vergrößerungsfunktion, es tritt ein weiterer Term im Nenner auf, der die Dämpfung in Form des oben angegebenen Lehrschen-Dämpfungsmaßes beschreibt.
Im folgenden Bild ist die Gleichung ausgewertet. Man erkennt, das die Vergrößerungsfunktion abhängt von der Größe des Dämpfungsmaßes (Kurvenparameter) als auch vom Verhältnis der Erregerfrequenz zur Eingenfrequenz. Durch die Invertierung der Achsbezeichnung in der rechten Hälfte gelingt es, die Kurven =0 auf Null herunterzuziehen und die Funktion dort zu beenden. Wenn, wie oft, der linke Parameter durchgängig verwendet würde, würden die Kurven erst im Unendlichen den Wert V=0 erreichen.
Der maximale Wert einer jeden Vergrößerungsfunktion tritt im Fall =1, d.h. im Resonanzfall auf, er beträgt dort allgemein: . Achtung: Im folgenden Bild sinf die Dämpfungsverhältnisse Ksi als Kurvenparameter angegeben, nicht das logarithmische Dekrement delta! Der Zusammenhang zwischen Dämpfungsgrad Ksi und logarithmischem Dekrement lautet: .
Bei kleinen Dämpfungen, wie sie im Bauwesen typisch sind, kann das quadratische Glied im Nenner vernachlässigt werden, die Formel vereinfacht sich dann zu: . Überprüfungg des Diagramms auf richtige Maximalwerte: z.B: . Ok!
Die Maximalwerte verschieben sich geringfügig von der Resonanzstelle mit steigender Dämpfung. Den Die Lage des Maximalwertes findet man leicht durch Ableitung der Vergrößerungsfunktion nach eta und anschließendem Nullsetzen (vgl. Mini-Max-Rechnung).
Da die logarithmischen Dekremente i. allg. gering sind, z.B. bei einem Stahlkamin mit delta=0.01, ergeben sich sehr große Resonanzantworten mit einem dynamische Vergrößerungsfaktor von pi/0.01=314!
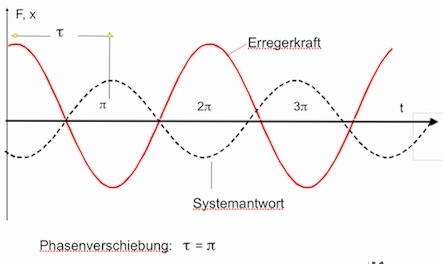
Im unteren Bildteil ist der sog. Phasengang dargestellt, d.h. der zeitliche Unterschied zwischen der Erregerfunktion und der Systemantwort. Bei Dämpfungsmaß =0 verläuft der Phasengang auf der schwarzen Kurve, d.h., er bleibt bei phi =0 und springt an der Resonanzstelle auf pi. Im ersten Fall folgt das System der Anregung also gleichsinnig, allerdings mit unterschiedlichen Antwortamplituden, aber immer im selben Zeitverlauf. Oberhalb der Resonanzstelle springt die Phase schlagartig auf Pi, d.h. die Antwort ist der Erregung genau entgegengesetzt, also gegensinnig. Siehe:
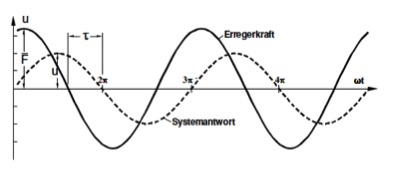
Sobald das System gedämpft ist tritt eien Phasenverschiebung zwische Erregung und Systemantwort auf, d.h. das System antwortet später als die einwirkende Erregung. Je größer die Dämpfung, desto größer die zeitliche Verschiebung, d.h. der Phasenunterschied. Die Systemantwort erfolgt im Takte der Erregung, d.h. mit gleicher Frequenz, aber eben nur zeitversetzt::
Im folgenden Video ist das Verhalten verdeutlicht. Dere SChwinger besteht aus einer Kugelmasse und einem Gummiband als Feder. Die Erregung wird aals Fußpunkterregung am Gummiband vorgenommen.
Im Resonanzfall werden die Schwingungsamplituden nur durch die Dämpfung begrenzt. Erregerkraft und Dämpferkraft stehen im Gleichgewicht, die Federkraft und die Massenkraft sind phasenverschoben ebenfalls im Gleichgewicht. Das folgende kleine Video macht die Phasenlagen deutlich. Das System besteht aus einer kleinen Masse, die an einem Gummiband aufgehängt ist. Als Erregung wird hier keine Erregung an der Masse angesetzt, das wäre zu kompliziert, sondern eine Fußpunkterregung. Es lässt sich zeigen – und das wird später gemacht – dass eine Krafterregung an der Masse und eine Fußpunkterregung (auch algebraisch) indentisch sind oder besser gemacht werden können.
Video 1: Phasenlage bei unterschiedlicher Erregung (ggf. aufs Bild klicken)
Man erkennt sehr schön, wie bei langsamer Erregung des Fußpunktes die Masse gleichsinnig der Fußpunktbewegung folgt. Bei Überschreiten der Eigenfrequenz tritt der erwähnte Phasensprung auf, die Kugel bewegt sich immer entgegen der Kraft, d.h. gegensinnig.
Da sich die Tragwerke je nach Eigenfrequenz bei einwirkenden Erregerfrequenzen unterschiedlich verhalten, spricht man auch von Abstimmung des Tragwerkes (das Bauwerk wird durch Steifigkeits- und Massenwahl wie eine Geige gestimmt). a) Hochabstimmung (<0.6 ): Das Tragwerk hat hohe Eigenfrequenzen, die Erregerfrequenzen sind damit verglichen niedrig, die Krafteinwirkungen erfolgen relativ langsam, d.h. quasistatisch. Die Massen- und Dämpfungskräfte sind klein. b) Tiefabstimmung ( >1.2 oder 1/=0.8): Die Erregerfrequenz ist deutlich höher als die Systemeigenfrequenz, das System ist also tief abgestimmt. Die schnell veränderlichen Einwirkungen setzen sich weitgehend mit der Massenkraft ins Gleichgewicht, die Verformungen und die Federkräfte bleiben klein, der Vergrößerungsfaktor geht mit wachsender Frequenz gegen Null. c) Resonanz (0.8><1.2 ): Wenn die Erregerfrequenz (etwa) gleich der Systemeigenfrequenz ist, liegt Resonanzerregung vor. Wegen der sehr kleinen Dämpfungskräfte bei schwach gedämpften Systemen sind deshalb die dynamischen Vergrößerungsfaktoren sehr groß. Resonanzerregung ist durch geeignete Systemverstimmung möglichst zu vermeiden. Gelegentlich wird der Resonanzeffekt bewusst verwendet, um Wirkungen gezielt zu verstärken.
Wenn also Schwingungen z.B. einer Maschine nicht auf die Unterkonstruktion oder auf das Bauwerk übertragen werden sollen (Schwingungsisolierung), muss das Tragwerk stets tief abgestimmt sein, d.h. man liegt rechts von der Resonanzfrequenz. Hier werden die Federkräfte, die an das Bauwerk weitergeleitet werden, deutlich kleiner als die rein statische Auslenkung. Unsinnig wäre es, die Maschine hoch abzustimmen (links von der Resonanzfrequenz), da hier die Federkräfte größer würden als im rein statischen Zustand. Als wichtige Aufgabe bei vielen Schwingungsproblemen ist deshalb die hinreichend genaue Bestimmung der Resonanzfrequenzen anzusehen. Wenn man Systeme verstimmen möchte, um Resonanz zu vermeiden, kann man demnach entweder die Massen und/oder die Steifigkeiten verändern. Da beide Größen unter der Wurzel stehen, müssen jedoch deutliche Änderungen der Systemwerte vorgenommen werden, wenn die Eigenfrequenzverschiebungen deutlich werden sollen. Außerdem ziehen Versteifung auch stets Massenerhöhungen nach sich, so dass der Effekt wieder teilweise kompensiert wird.
4. Reduktion komplexer Systeme auf Einmassenschwinger
Im oben Dargestellten wurde nur der sog. Einmassenschwinger behandelt, d.h. ein Schwinger mit nur einem Freiheitsgrad. Reale System haben allerdings im Grenzfall unendlich viele Freiheitsgrade. Dies setzt eine Erweiterung der oben dargestellten Theorie auf Mehr-Freiheitsgrad-Systeme voraus. Die wesentlcihen Erkenntnisse, die oben gewonnen wurden, werden dadurch erfreulicherweise nicht geändert.
Wenn man nicht ganze Systeme dynamisch berechnen möchte (i.a. mit Hilfe entsprechender Rechenprogramme), kann man viele Systeme dennoch näherungsweise auf dynamisch äquivalente Einmassenschwinger reduzieren. Das geht allerdiings nur für eine Schwingungsform eines Systems.
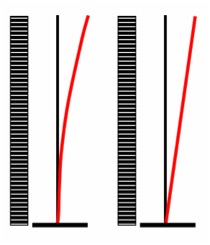
Das Abbilden von Mehrfreiheitsgradsystemen auf dynamisch äquivalente Einmassenschwinger, nennt man Generalisieren. Der Einmassenschwinger wird dazu durch eine generalisierten Masse, eine generalisierten Steifkeit dargestellt und durch eine generalisierte Kraft erregt.
Bei der Generalisierung wird das nur in einer Eigenform φ*(x) schwingende System durch einen Einmassenschwinger am interessierenden Ort xE ersetzt, der die gleiche
Schwingamplitude φ*(xE) und die gleiche
kinetische Energie aufweist.
Im o.a. BIld ist der generalisierte Einmassenschwinger in der Höhe xE gedanklich angebracht worden, weil die Reaktionen des tatsächlichen Systems an dieser Stelle interessierten. Im Regelfall wird man sich für die maximalen Spitzen-Amplituden interessieren, dann wird der generalisierte Einmassenschwinger gedanklich an der Spitze, also bei xE=h angebracht. Für die Bestimmung der generalsierten Größen muss die Eigen-SChwingform bekannt sein, also die Schwingungsform, bei der das System unter der betrachteten Eigenfrequenz schwingt. Die ERleichterung besteht adrin, dass hierfür auch Näherungen gewählt werden können, z.B. die Funktion der Biegelinie unter Eigengewicht oder aber sogar eine lineare FUnktion. Die gewählte Funktion muss das Verhalten grob darstellen, evtl. Nulldurchgänge müssen also mit erfasst werden:
Die sog. generalisierte Masse ergibt sich durch Integration der verteilten Massen multipliziert mit dem Quadrat der i-ten Eigenform phi_i über die Länge. phi_i ist die Schwingungsform, die zur untersuchten i-ten Eigenfrequenz gehört. Sie ist nicht absolut einzusetzen, sondern vorher durch die Amplitude an der Stelle x_E des gedachten, generalisierten Einmassenschwingers zu dividieren. D.h.: .
Damit wird die Schwingungsform dimensionslos, mit dem Wert an der Stelle x_E gleich 1.0. Die Herleitung gelingt über das Gleichsetzen von a) der kinetischen Energie des Gesamtsystems und b) der Schwingamplitude. Es gilt: . Dabei ist m die verteilte Masse und M je eine Einzelmasse.
Die generalisierte Steifigkeit ergibt sich zu: .
Dies setzt naturgemäß die Kenntnis der Eigenfrequenz voraus. Wenn diese nicht bekannt ist, muss die generalisierte Steifigkeit aus
bestimmt werden. An einer schwingenden Struktur verteilt angreifende Kräfte müssen ebenfalls zu generalisierten Kräften zusammengefasst werden. Es gilt: .
An der Stelle xE wird zunächst gedanklich der generalisierte Einmassenschwinger positioniert. Die sich ergebenden Schwingamplituden des generalisierten Einmassenschwingers entsprechen dann den Amplituden der zugrunde gelegten Eigenform der tatsächlichen Konstruktion an dieser Stelle, die Verformung über das reale Bauwerk ist affin zur Eigenform phi_i.
Die Integrale erstrecken sich über das gesamte System. Die Anteile außerhalb der Integrale erfassen entsprechende Einzelwirkungen. Wenn die Werte der Eigenformen nicht analytisch, sondern zahlenmäßig vorliegen, werden zunächst die Produkte unter den Integralen an den Orten x gebildet und diese dann mit Hilfe numerischer Integrationsformeln, wie der Simpson- oder Trapezregel integriert, z.B. mit Excel-Tabellen o.ä.
Wie schon erwähnt, können bei einfachen Systemen mit überschaubaren Eigenschwingformen auch Näherungsannahmen für die Eigenform getroffen werden, wie z.B. die Form der Eigengewichtsbiegelinie.
Beispiel: Gespanntes Seil mit Einzelmasse Schwingendes straff gespanntes, massebelegtes Seil mit Gesamtlänge l, mit Einzelmasse in der Mitte.
Bedingt durch die mittige Einzelmasse wird das Seil eine etwa geradlinige Schwingungsform annehmen, d.h. die Eigenschwingform ist näherungsweise dreieckig. Die geringen Durchhangsanteile infolge der Seilmasse werden vernachlässigt. Da die Massenbelegung des Seils konstant ist, kann die verteilte Seilmasse in Gleichung für die generalisierte Masse vor das Integral gezogen werden: . Für die Erfassung der verteilten Masse muss also lediglich über das Quadrat der dreiecksförmige Eigenschwingform integriert werden. Hierfür nutzen wir die ∫M ×M ×dx Tabellen (Faktor Dreieck-Dreieck: 1/3). Es wird nur über die halbe Länge integriert, der Faktor 2 sorgt für Ausgleich: .
Zur Erfassung der verteilten Masse muss also ein Drittel der gesamten Seilmasse (in kN s2/m oder Tonnen) in der Mitte platziert werden. Die dort schon vorhandene Einzelmasse wird dann einfach dazu addiert.
Für die Ermittlung der generalisierten Steifigkeit wird die Eigenfrequenz benötigt. Dies ergibt sich nach Gleichung (2.15), d.h. es gilt w = K /M . Die Ermittlung der Steifigkeit K erfolgt mit Hilfe einer statischen Berechnung. Dazu wird eine Einheitslast am Ort und in Richtung der zu ermittelten Systemsteifigkeit angesetzt und die Verformung bestimmt. Die Steifigkeit ergibt sich dann als Kehrwert der Verformung.
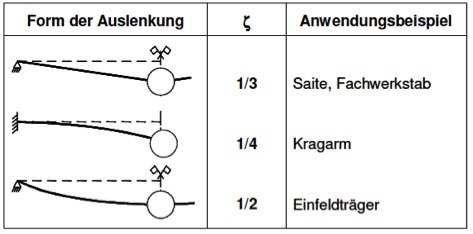
Die Berücksichtigung einer verteilten Masse kann, wie dargestellt, mit Hilfe des Konzepts des generalisierten Einmassenschwingers erfolgen. In Bild 2.12 sind für drei unterschiedliche Eigenschwingformen Faktoren für die anzusetzende Masse angeben. Die generalisierte Masse ergibt sich aus dem Produkt der gesamten verteilten Masse mit dem Reduktionsfaktor z, dieser hat nichts zu tun mit der bezogenen Dämpfung. Der Ort, an dem die Ersatzmasse wirkt, ist angegeben.
Die Tabelle zeigt, dass es lediglich auf den Verlauf der Schwingungsbiegelinie ankommt, ob es um ein Seil oder einen Biegestab geht, spielt keine Rolle. In allen Formeln für den generalisierte Einmassenschwinger kommen nur die Massen und die Schwingungsform phi vor. Ausnahme generalisierte Steifigkeit, wenn über das Integral gerechnet wird.
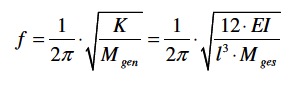
Die unterste Eigenfrequenz eines Kragarms mit gleichmäßig verteilter Masse kann also näherungsweise so bestimmt werden, dass im Modell anstelle der verteilten Masse, eine generalisierte Ersatzmasse Mgen =Mges / 4 an der Spitze angesetzt wird. Die Federsteifigkeit an dieser Stelle beträgt K=3×EJ / l^3, die Eigenfrequenz ergibt sich damit zudamit zu: .
5. Nichtharmonische Schwingungen
5.1 Periodische Schwingungen
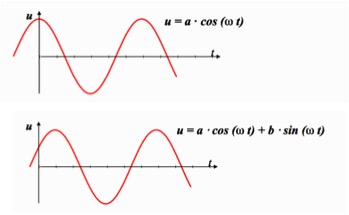
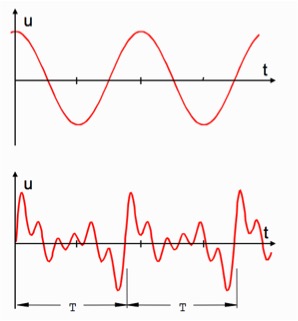
Bisher haben wir sog. harmonische Schwingungen betrachtet. Das sind solche, bei denen der Antwort-Zeitverlauf einer Sinus- oder Cosinus-Funktion (oder beiden) folgt, (vgl nächstes Bild, oberer Teil). Solche Schwingungen treten auf, wenn auch die Erregung harmonisch ist, z.B. bei Unwuchtproblemen etc.
Vielfach werden Schwingungen beobachtet, die zwar nicht harmonisch sind, die sich jedoch nach einem Zeitintervall, der sog. Periode, vollständig wiederholen, vgl. obiges Bild unterer Teil. Beispiele für derartige Schwingungen sind z.B. Schwingungen von Glockentürmen bedingt durch die pendelnde Masse der Glocke, Anregungen aus rhythmischem Marschieren etc. Die vorher dargestellten harmonischen Schwingungen stellen einen (wichtigen) Sonderfall der periodischen Schwingungen dar.
Durch eine Zerlegung der periodischen Schwingung in ihre harmonischen Bestandteile mit Hilfe der sog. Fourier-Analyse, lassen sich periodische Schwingungen durch eine Summe harmonischer Schwingungen mit unterschiedlicher Frequenz und Amplitude darstellen. Für jede so bestimmte Harmonische (gelegentlich – in Anlehnung an die Akustik – auch Oberton genannt) wird eine dynamische Untersuchung nach den o.a. Verfahren durchgeführt. Das Ergebnis der mehrfachen dynamischen Wirkung wird dann phasenrichtig addiert. Das wird am einfachen mit der folgenden Formel vorgenommen:
Die periodische Schwingung wird hiermit also auf die bereits behandelten harmonischen Schwingungen zurückgeführt. Für die zu zerlegende Ausgangsfunktion F(t) gilt dann ähnlich:
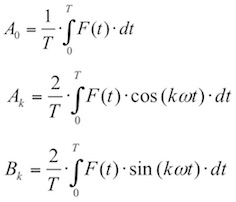
Die in der Summenformel auftretenden Koeffizienten der trigonometrischen Funktionen steuern die Amplitude der jeweiligen Harmonischen k. Sie werden auch Fourier-Koeffizienten genannt. Sie werden wie folgt bestimmt:
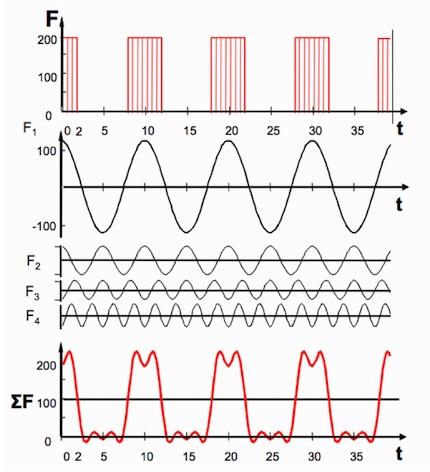
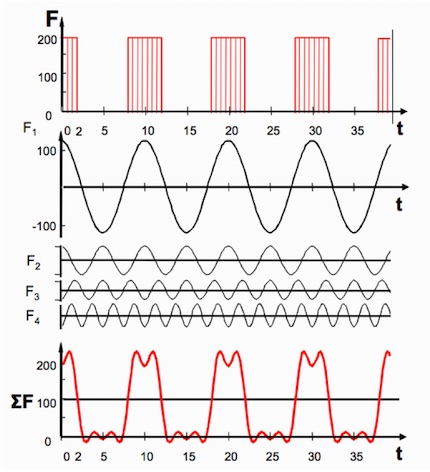
Die Fourierkoeffizienten messen die Größe der Übereinstimmung mit der jeweiligen harmonischen Funktion. Wenn F(t) der harmonischen Funktion sehr ähnlich ist, wird das Produkt und damit das Integral groß. Wenn aber z.B. eine sin-Funktion über eine Periode eine konstante Funktion bewerten soll, wird Null herauskommen, da der negative Zweig der Sinus-Funktion mal der konstanten Funktion den gleichen Wert ergibt, wie der positive Zweig mal der konstanten Funktion. Die Gesamtfläche und damit das Intergral wird zu Null. Anders formuliert: Eine Sinus-Funktion ist zum Modellieren einer konstanten Funktion ungeeignet. Ebenso werden im Beispiel Hammerwerk (nächstes Bild) die Fourierkoeffizienten A_k – die als Amplituden der Sinus-Funktion stehen – allesamt zu Null, da die Lastfunktion eine bezüglich des Ursprungs eine gerade Funktion ist, d.h. sie ist an der Ordinate gespiegelt. Eine Beschreibung durch ungerade Funktionen, wie dem Sinus wird deshalb nicht gelingen. Jeder Sinus-Anteil würde z.B. dem am Ursprung befindlichen, halbsymmetrsichen Rechteckblock links vom Nullpunkt etwas abziehen, rechts davon etwas addieren. Das kann bei einer geraden Funktion nicht sein, ergo werden die Sinuskoeffizienten allesamt Null. Im folgenden Bild ist das Prinzip dargestellt. Ein Folge von Rechteckimpulsen wird z.B. durch ein Hammerwerk erzeugt. Man erkennt neben der anzunähernden Funktion oben, die ersten 4 Harmonischen, mit geeigneten Amplituden – die den Fourier-Koeffizienten entsprechen. Zusammenaddiert ergibt sich die so angenäherte Funktion. Je mehr Reihenglieder mitgenommen werden, desto genauer wird die Rechteckfunktion angenähert. Eine exakte Annäherung wird erst nach unendlich vielen Reihengliedern erzielt. Ingenieurmäßig wird man es bei einer endlichen Zahl von Reihengliedern belassen, wenn einem die Annäherung hinreichend erscheint. Dies Entscheidung ist problemabhängig.
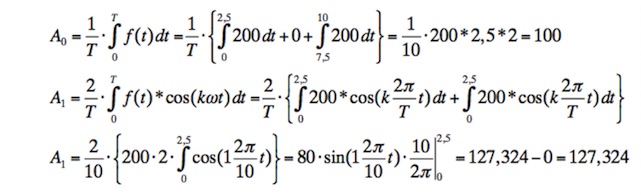
A_0 ist der Mittelwert der periodischen Funktion, er entspricht einer rein statischen Wirkung und interessiert deshalb hier nicht weiter. Die Fourier-Koeffizienten werden für alle n Frequenzen ausgewertet. k ist der Index der jeweiligen Harmonischen. Die Summation unendlich vieler Reihenglieder ergibt die gewünschte Funktion. In der Praxis wird die Entwicklung abgebrochen, wenn die Funktion genügend genau angenähert ist. Das „genügend genau“ muss problemabhängig bewertet werden.Wegen der einfachen Funktion f(t) wird hier die Integration einfach. Die konstante Funktion mit Maximalwert 200 wird immer vor das Integral gezogen. Die Periodendauer, kurz die Periode, ist T=10s. Da die Integration von t=0 bis t=2,5 und von t=7,5 bis t=10 gleich sind, wird nur ein Block berechnet. Die Integration selbst, die ja bei bestimmten Integralen die Fläche unter der Funktion innerhalb der Integrationsgrenzen bestimmt, wird bei der Bestimmung des A_0 Gliedes einfach duch die Flächenberechnung ersetzt. Bei der Bestimmung der Koeffizienten der cos-Funktionen wird die Größe omega im Argument des cosinus durch 2pi/T ersetzt, vgl. dazu die Ausführungen vorn im Kapitel 3.1 Freie Schwingungen. Die Berechnung der Koeffizienten ist neben dem Zerlegungs-Bild beispielhaft für A_0 und A_1 durchgeführt.
Periodische Schwingungen können also durch eine solche Fourier-Zerlegung der periodischen Funktion auf eine Summe Harmonischer Schwingung zurückgeführt werden. Diese werden für jede Harmonische einzeln, nach den oiben angegebenen Verfahren gelöst. Anschließend wird dann die phasenrichtig, durch Anwendung der Summenformel, addiert: .
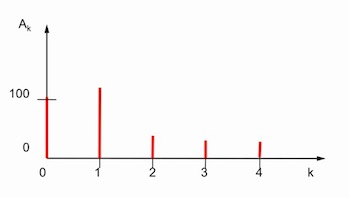
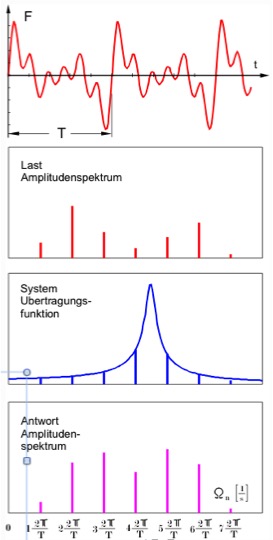
Die einzelnen Fourieramplituden der Belastung werden meistens in einem sog. Last-Amplitudenspektrum gemeinsam dargestellt. Ein Amplkitudenspektrum beschreibt in kurzer Form die Schwingung. Die Frequenzen der einzelnen Harmonischen sind auf der Abszisse aufgetragen, die Amplituden auf der Ordinate. Damit sind alle Bestimmungsstücke gegeben.
Das System wird für jede Frequenz k für eine Einheitserregung F=1 berechnet, es ergibt sich die sog. Systemübertragungsfunktion
Die Produkte des Last-Amplitudenspektrums und der Übertragungsfunktion ergeben das Antwort-Amplitudenspektrum. Die Amplituden werden mit den zugehörigen sin- cos-Funktionen multipliziert und die entstehenden Funktionen addiert.
Eine Auftragung der sich für jede Frequenz ergebenden Beträge der Fourierkoeffizienten die die Amplituden der einzelnen harmonischen Teilschwingungen darstellen ergibt das sog. Amplituden-spektrum. Das folgrende Bild zeigt das Amplitudenspektrum der Hammerwerksfunktion:
Die Summenbildung in der o.a. Gleichung kann auch im Frequenzbereich interpretiert werde. Hierzu muss zunächst die sog. Übertragungsfunktion des dynamischen Systems ermittelt werden. Dies lässt sich leicht mit Hilfe der o.a. Formeln durchführen, wenn als Erregung eine harmonische Erregung (sin-Funktion) mit steigender Frequenz k⋅ω (k=1,2,3,…) und der Amplitude „1“ zugrunde gelegt wird. Wenn die Lastamplituden, die die Auswirkung der realen Last erfassen mit den System-Übertragungsfunktionen, die unter der Last „1“ ermittelt wurden, entssteht als Antwort die Systemantwort unter dieser Frequenz und der realen Last. Das Ergebnis der Multiplikation wird als Antwortspektrums linie darunter dargestellt. Der Verfasser ermittelt die System-Übertragungsfunktion über einen weiten Frequenzbereich, so dass hier eine Funktion und keine einzelnen KInien entstehen. Das folgende Bild zeigt die Vorgehenbsweise :
Man erkennt deutlich die Lage der Resonanzfrequenz, bei Multiplikation mit einer Lastamplitude in Resonanzfrequenz entstünden unter der Einheitslast große Antworten . Beim gezeigten Beispiel liegt (günstigerweise) keine der Linien des Lastspektrums im Bereich der System-Resonanzspitze. Da die Berechnung in Abhängigkeit von der Frequenz durchgeführt wurde, spricht man von einer Berechnung im Frequenzbereich. Um eine Antwort im Frequenzbereich zu berechnen, ist jedoch nicht nur Amplitudenspektrum, sondern auch das Phasenspektrum der Erregung notwendig. Die Übertragungsfunktion ist deshalb komplex, zu Details wird auf das Fachschrifttum verwiesen [1], [2], [3], [4], [9], [11] .
5.2 Nichtperiodische Anregung
Nichtperiodische oder transiente (von lat. trans ire: vorübergehen) Schwingungen treten einmalig auf. Beispiele sind z.B. Anpralllasten, Explosionen, einmalige Hammerschläge etc. Zur Berechnung werden Verfahren im sog. Frequenzbereich oder im sog. Zeitbereich eingesetzt. Bei den Frequenzbereichsverfahren, wird der im Grunde einmalige Kraft-Zeit-Prozess als im Unendlichen periodisch wiederholter Prozess angesehen. Damit wird er auf die periodische Bewegung zurückgeführt. Wegen des Übergangs auf die unendliche Periode werden aus den Summen in Gleichung (2.66) Integrale, die Fourierkoeffizienten werden zu Funktionen. Die o.a. dargestellte Fourier-Analyse wird zur sog. Fourier-Transfomation.
Näherungsweise kann man auch nichtperiodische Scgwingungen als periodische betrachten. Hierzu muss man die Periode des gedanklich wiederholten Signals so groß wählen, dass die Antworten unter dem transienten Stoß abgeklungen sind, bis der nächste periodische Stoß kommt.
Bei der Berechnung im Zeitbereich wird die Schwingungsdifferentialgleichung (2.5) schrittweise nu-merisch integriert. Dies sind klassische Aufgaben der eingangs vorausgesetzten Schwingungs-Computerprogramme, mit denen in der Regel, neben der Ermittlung der Eigenfrequenzen und Eigen-formen, die dynamische Antwort auf beliebige Erregungen bestimmt werden kann.
5.3 Fußpunktanregung
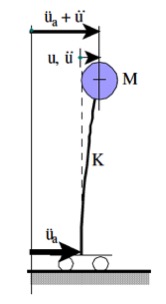
Bisher wurde der Fall einer harmonischen Erregerkraft behandelt. Gelegentlich werden Tragwerke aber auch durch eine Erregung des Fußpunktes zu Schwingungen angeregt, wie z.B. beim Lastfall Erdbeben oder bei der Erschütterungsausbreitung.
Auch dieser Fall kann einfach mit Hilfe der angegebenen Verfahren behandelt werden, wenn bei der Herleitung davon ausgegangen wird, dass die Massenträgheitskraft von der Gesamtverschiebung, die Federkraft dagegen von der Relativverschiebung zwischen Masse und Fußpunkt abhängt, siehe Abbildung 2.28. Die Bewegungsgleichung lautet dann:
Umgestellt nach Bekannten (die Fußpunktbeschleunigung ü:a ist gegeben) und Unbekannten (u und seine Ableitungen) ergibt sich:
Die Fußpunkterregung kann also wie eine Krafterregung behandelt werden, wenn der Beschleuni-gungsverlauf am Fuß bekannt ist. Die Verschiebung einschließlich aller Ableitungen sind hierbei relativ zum verschobenen Fußpunkt gemessen.
1.1 Maschinen mit rotierenden Massen
1.1.1 Allgemeines
Maschinen bei denen rotierende Massen dynamische Einwirkungen erzeugen können z.B. sein:
Ventilatoren
Zentrifugen
Waschmaschinen
Drehmaschinen
Zentrifugalpumpen
Rotationspressen
Turbinen und Generatoren
Maschinen mit rotierenden Teilen, wie Generatoren, Gebläse, Zentrifugen etc., verursachen dynamische Belastungen, durch Unwucht der rotierenden Teile. Die hierdurch hervorgerufenen Schwingungen können unzulässig große Werte annehmen, oder zu Ermüdungsschäden am unterstützenden Bauwerk oder an der Maschine selbst führen. Wenn größere Schwinggeschwindigkeiten oder Beschleunigungen auftreten, kann es zu Beeinträchtigungen des menschlichen Wohlbefindens kommen.
Im Regelfall werden Maschinen ausgewuchtet, so dass die Erregerkräfte und damit auch die Schwingungen klein sind. Über die Größe der zulässigen Unwucht siehe VDI-Ri. 2060, „Beurteilungsmaßstäbe für den Auswuchtzustand rotierender starrer Körper“. Häufig sind auch Störfall-Unwuchten zu berücksichtigen, z.B. der Bruch einer Turbinenschaufel. Daneben gibt es Maschinen, die planmäßig stark unwuchtig sind, wie z.B. Vibratoren. Im Folgenden wird zunächst auf die Belastungen eingegangen.
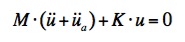
Die Art der Kraft-Zeitfunktion ist abhängig von der Art der Maschine. Bei bewegten Maschinenmassen ist der zeitliche Verlauf der Erregerkräfte periodisch, wenn die Erregung aus umlaufenden, unwuchtigen Maschinenteilen herrührt, sogar harmonisch. Unwuchten treten stets dann auf, wenn der Massenschwerpunkt nicht mit der Rotationsachse übereinstimmt.
Bei umlaufenden Massen ergibt sich die Kraftwirkung zu: .
Hierin ist m die Masse des rotierenden Teils und e oder r die Exzentrizität der rotierenden Masse. Eine solche Anregung, bei der die Kraft quadratisch mit der Frequenz zunimmt, wird als quadratische Anregung bezeichnet. Die entsprechenden Werte werden i. allg. vom Maschinenhersteller angegeben. Die Kraft wirkt radial umlaufend. Sie kann durch zwei harmonische Komponenten ersetzt werden: .
Beide Komponenten dürfen i. Allg. als getrennte Lastfälle betrachtet werden. Die maximale Amplitude bei gemeinsamer Wirkung ergibt sich dann aus der geometrischen Summe der Einzelantworten: .
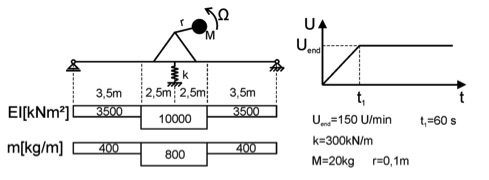
1.1.2 Beispiel: Unwuchterreger auf einem Deckenträger**
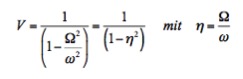
In der folgenden Abbildung ist ein Beispiel einer Decke mit einem Unwuchterreger dargestellt. Die Decke wird in Feldmitte durch einen Querträger elastisch gestützt. Das Tragwerk wurde durch einen generalisierten Einmassenschwinger abgebildet. .
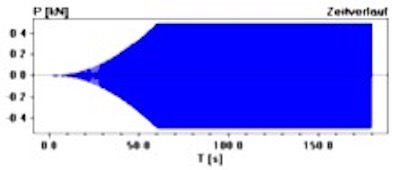
Im Folgenden wird der Zeitverlauf der Erregung und die Schwingungsantwort dargestellt:
Kraft-Zeit-Verlauf Verschiebungs-Zeit-Verlauf
Im Bild oben links ist zu erkennen, dass die Umdrehungsgeschwindigkeit erst nach ca. 60 Sekunden nach dem Einschalten der Maschine erreicht wird, die Erregerkraft nimmt quadratisch mit der Zeit zu, vgl. o.a. Gleichungen. Zunächst ist die Tragwerksreaktion sehr gering, es wird sozusagen quasistatisch belastet. Beim Annähern an die Resonanzfrequenz wachsen die Amplituden stark an. Zu einem Zeitpunkt ca. 40 Sekunden nach dem Einschalten der Maschine ist die Rotationsfrequenz gleich der Eigenfrequenz des Tragwerks. Hier werden Amplituden erreicht, die mehr als des 10-fache der stationären Antwortamplitude betragen. Das numerische Beispiel wurde mit dem Programm StTools (httpss://www.stwind.stahlbau.tu-braunschweig.de) des Instituts für Stahlbau der TU-BS berechnet.
Periodische, aber nichtharmonische Kräfte, die z.B. durch Kolbenmaschinen, Webstühle, Glocken etc. erzeugt werden, können stets durch Fourierzerlegung in ihre einzelnen harmonischen Bestandteile zerlegt werden (vgl. Grundlagen). Die aus den einzelnen harmonischen Anteilen entstehenden Schwingungsantworten werden getrennt ermittelt und anschließend gemäß Gleichung (2.66) zusammengesetzt.
Die Schwingungen von Glocken gehören z.B. in diese Kategorie. Bei schwingungsempfindlichen Glockentürmen können durch die schwingenden Glockenmassen erhebliche Struktur-Schwingungen ausgelöst werden.
1.2.2 Beispiel 1: Glockenerregung
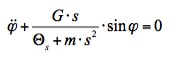
Die Berechnung von Glockentürmen ist in der DIN 4178 geregelt. Dort ist ein Modell zur Beschreibung der Lasten zu finden, die während des Läutens von der Glocke auf das Joch abgegeben werden. Die Bewegung der Glocke kann als Pendel aufgefasst werden, da die Auslenkungen der Glocken, der sog. Läutewinkel, sehr groß sein kann, ist eine Linearisierung der Bewegungsgleichung nicht mehr zulässig. Die Schwingungsdifferentialgleichung für die freie Glockenschwingung lautet: .
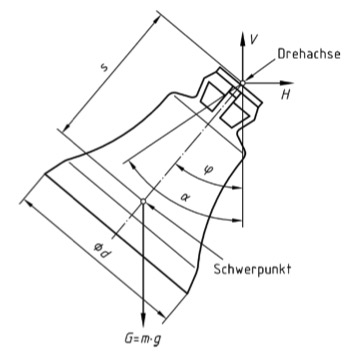
Die Bezeichungen nach DIN 4178 sind in der folgenden Skizze gegeben: .
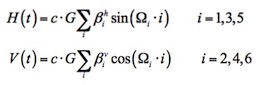
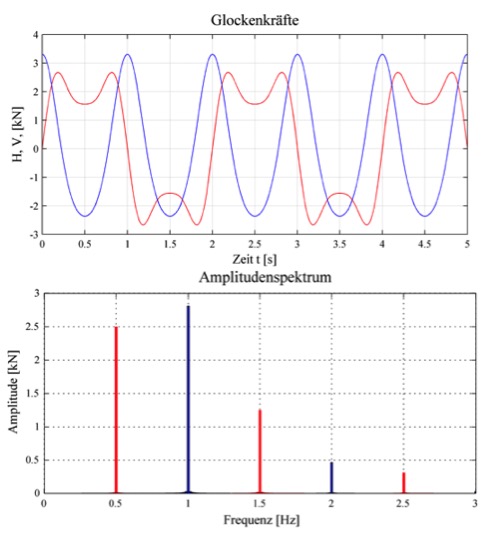
Die von der Glocke auf den Glockenstuhl einwirkenden Kräfte werden in der DIN 4178 durch eine Fourier-Reihe approximiert. Die Funktion zur Beschreibung der zeitabhängigen Horizontal- und Vertikalkraft lauten: .
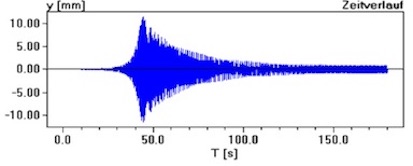
In der foilgenden Abbildung ist oben der Zeitverlauf der Glockenkräfte in horizontaler Richtung (rot) sowie in vertikaler Richtung (blau) dargestellt. Das untere Teilbild zeigt das zugehörige Amplitudenspektrum mit den beteiligten harmonischen Komponenten.
Der weietere Lösungsweg ist dann einfach:
Ermittlung der Tragwerksamplituden unter den Erregungsfrequenzen und Erregungsamplituden, die im Amplitudenspektrum ausgewiesen sind. Hierzu kann das im Abschnitt Grundlagen angegebene Verfahren genutzt werden. Der Vergrößerungsfaktor zur rein statischen Belastung ergibt sich zu: .
Hierin ist Groß_Omega die Erregerfrequenz der jeweiligen Glockenschwingungsharmonischen (siehe Abszisse des Amplitudenspektrums), klein_omega ist die Eigenfrequenz der Struktur, also z.B. des Glockenturms.
Es ergeben sich die Amplituden der Systemantwort. Sie könnten z.B. wieder in einem Amplitufdenspektrum dargestellt werden. Die Amplituden müssen jetzt
nach der Formel: phasenrichtig überlagert werden.
1.2.3 Beispiel 2: Rüttelsieb auf Stahlbühne
Durch ein Rüttelsieb für Kunststoffgranulat wurden in einem Chemiewerk starke Bühnenschwingungen hervorgerufen. Vom Hersteller des Rüttelsiebens werden in vertikaler Richtung, die hier ausschließlich Gegenstand der Untersuchungen ist, zwei Erregerfrequenzen genannt: f_1=4.33 Hz und f_2=8.66 Hz. .
Die Amplituden der Kräfte sind laut Hersteller an den vier Eckpunkten der Maschine gleich groß und betragen 0.8 kN bzw. 1.1 kN. Die Stahlbühne ist in der folgenden Abbiuldung in Draufsicht dargestellt. Um zu prüfen, ob Resonanz vorliegt, wurde zunächst die Decke einschließlich des Siebes mit unterschiedlichen Annahmen bezüglich der Verbindungssteifigkeiten untersucht: zum einen wurde eine gelenkige Verbindung der Nebenträger untersucht, zum anderen eine biegesteife Verbindung. Das Rüttelsieb gibt die Kräfte an den vier Punkten der großen Mittelöffnung (schraffiert) ab. Das Sieb wurde dort mit seinen anteiligen Massen berücksichtigt: .
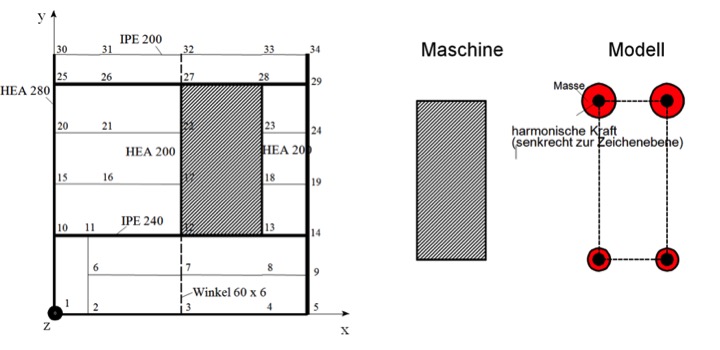
Die untere Eigenfrequenz liegt bei f1=4,3 Hz, die zweite Eigenfrequenz beträgt f2=8,2 Hz. Die zur unteren Eigenfrequenz gehörende Eigenschwingungsform ist eine horizontale Schwingung in der Deckenebene, sie liegt relativ weit von der Erregerfrequenz entfernt. Die zweite Erregerfrequenz der Siebmaschine liegt dagegen mit 8.66 Hz sehr nahe an der zweiten berechneten Eigenfrequenz von f2=8,2 Hz und führt somit zu einer deutlichen dynamischen Überhöhung. Die folgende Abbildung zeigt die Auslenkungsform für den Fall, dass die harmonische Erregung genau mit der zweiten Eigenfrequenz erfolgt.
Die Berechnungen machen deutlich, dass insbesondere die zweite Erregerfrequenz der Siebmaschine große Schwingungsamplituden der Bühne verursachen kann. Die größten Werte treten im Bereich des Knotenpunktes 12 auf, was mit subjektiven Wahrnehmungen bei Aufenthalt auf der Bühne während des Betriebs übereinstimmt. Die durch die erste Erregerfrequenz fe=4,33Hz induzierte Schwingungen sind hierbei von untergeordneter Bedeutung.
Eine Sanierung bietet sich also an, durch gezielte Verstimmung der zweiten Eigenfrequenz der Bühne. Betrachtet man die Verformungsfiguren in Abbildung 4.7 so fällt eine Möglichkeit sofort ins Auge. Die beiden Querunterstützungen der Maschine sind relativ weich. Eine Verstärkung der Träger in von Knoten 10 bis 14 und 15 bis 29 durch eine Unterspannung hebt die Eigenfrequenzen auf f1=10,4 Hz und f2=13,1 Hz. Beide Frequenzen liegen nunmehr oberhalb der Erregung. Allerdings besteht die Gefahr, dass durch geringe Steifigkeitsreduktionen nunmehr die erste Eigenfrequenz in den Bereich der zweiten Erregerfrequenz fällt und wiederum große Resonanzamplituden hervorruft. Eine weitere Möglichkeit besteht darin, durch einen zusätzlich unterhalb angeklemmten Träger die Achse vom Knoten 3 zum Knoten 32 zu verstärken. Die hierzu gehörenden Eigenfrequenzen betragen f1=7,5 Hz und f2=11,6 Hz. Die untere Eigenfrequenz liegt immer noch bedrohlich in der Nähe der zweiten Erregerfrequenz von 8,33 Hz. Im Folgenden wird nunmehr der Träger nicht mehr vom Knoten 3 zum Knoten 32 geführt, sondern nur bis zum Knoten 22. Die untere Eigenfrequenz beträgt nunmehr f1=6,3 Hz, die zweite Eigenfrequenz steigt auf 11,3 Hz an. Beide Frequenzen liegen ausreichend weit von den Erregerfrequenzen entfernt. Diese Lösung wird ausgeführt. Man erkennt an diesem Praxisbeispiel, dass in der Dynamik eine Verstärkung keineswegs immer die Lösung des Problems darstellt, wie in der Statik üblich. Eine Verstärkung kann sich, wegen der damit einhergehenden Verstimmung, durchaus negativ auswirken.
Eine weitere Möglichkeit, besteht in der Anbringung eines Elementes zur Erhöhung der Dämpfung, vgl. . Bei Resonanzerregung ist Dämpfung immer eine Maßnahme, die funktioniert. Siehe dazu Abschnitt Schwingungsbeherrschung. Im vorliegenden Fall wurde die horizontale Anregung der Siebe mit einem erweiterten Modell simuliert, um genauere Werte für die dynamischen Kräfte zu erhalten.
Im folgenden ist eine Simulation des Verhaltens einschließlich der Bewegung der beiden horizontal verschieblichen Siebschübe dargestellt: Rüttelsieb.m4v
1.3 Maschinen mit stoßenden Massen
Hierzu können z.B. gehören:
Formpressen
Stanzmaschinen
Maschinenhämmer
Schmiedepressen
Die dynamische Belastung wird in Form eines Kraftstoßes ausgeübt. Z.B. durch herabfallende Massen oder durch hydraulische Pressen.
Im Regelfall werden bei solchen Maschinen die Kraftwirkungen periodisch erfolgen. Dann kann, wie im Abschnitt Grundlagen beschrieben, die periodisceh Belastung in ihre harmonischen Anteile zerlegt werden. Im Abschnitt Grundlagen wurde hierfür der Kraft-Zeitverlauf eines Hammerwereks verwendet. Das zugehöriuge Bild, das die Zerlegung zeigt, wird hier noch einmal gezeigt:
Für jede Harmonische wird dann die dynamische Reaktion – durch Ermittlung der Vergrößerungsfunktion – bestimmt.
Die Einzellösungen werden dann phasenrichtig überlagert:
1. Nichtperiodische Erregung mit definiertem Last-Zeitgesetz
Stoßartige, d.h. vorübergehende (lat. transire, daher auch transiente) Erregung eines Tragwerkes tritt dann auf, wenn die Belastung nur über eine kurze Zeit-spanne einwirkt. Klassische Beispiele hierfür sind z.B. Explosionen, Fahrzeuganprall oder ähnliche. Stoßbeanspruchung stellen häufig Katastrophenlastfälle dar, bei denen hohe Bauteilbeanspruchungen mit plastischen Verformungen zugelassen werden. Um die hierbei auftretenden nichtlinearen Effekte und deren dissipierende Wirkung zutreffend zu erfassen, empfiehlt es sich, die Berechnung als nichtlineare Zeitschrittberechnung durchzuführen. Hierbei können die Bauteilwiderstände in jedem Zeitschritt an die vorhandene Beanspruchung angepasst werden. Dies ist jedoch nur mit großen Programmsystemen möglich (Ansys, Abacus, etc).
Berechnen lassen sich solche dynamischen Erregungen ebenfalls mit der im Abschnitt Grundlagen vorgestellten Fourier-Analyse. Hierbei muss man nur dafür sorgen, dass die Systemantwort vor Erreichen der Periode verschwunden oder stark abgeklungen ist. Im folgenden Kapitel 3.1 sind einige Last-Zeitgesetze genauer untersucht worden und die Ergebnisse als Vergrößerungsfaktoren in Kurven angegeben.
1.1 Stoßbelastung
Für eine näherungsweise Untersuchung kann man das Tragwerk auf einen generalisierten Einmassenschwinger reduzieren (vgl. Abschnitt 2.7) und mit dynamischen Vergrößerungsfaktoren arbeiten, die im Abschnitt Grundlagen angegeben sind. Hierzu muss die Form des Last-Zeitgesetzes bekannt sein. Die Schwingzeit T ergibt sich aus der Eigenfrequenz: T=1/f [sec], t_d ist die Dauer des Stoßes.
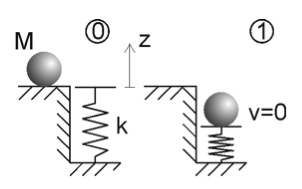
Man erkennt, dass der dynamische Vergrößerungsfaktor maximal gleich 2 ist. Der Vergrößerungsfaktor gibt die maximale Amplitude, verglichen mit der rein statischen Wirkung der Kraft an. Für Dimensionierungszwecke reicht dieser Faktor in der Regel. Der maximale Vergrößerungsfaktor 2,0 für die Stoßwirkung ergibt sich auch aus einer einfachen Energieüberlegung mit dem Energiesatz. .
Die Masse befindet sich zunächst in der Ruhelage 0 vor der Feder, siehe Folgebild:
Wegen der Definition von z gilt z_0=0. Die Masse ist in Ruhelage, so dass auch die vertikale Geschwindigkeit v identisch Null ist: .
Als nächstes wird der Zustand 1 mit der maximalen Durchsenkung z_1=wmax betrachtet: Die Masse führt zu einer dynamischen Verformung der Feder. Im Moment der maximalen Durchsenkung der Feder ist die vertikale Geschwindigkeit v der Masse wegen der Wegumkehr identisch Null. Es gilt dann: .
Dem Energiesatz folgend, muss die Summe aus kinetischer und potentieller Energie in den beiden Lagen 0 und 1 gleich sein.: .
Bei einer plötzlichen Belastung einer elastischen Feder ergibt sich also der doppelte Wert der statischen Durchbiegung.
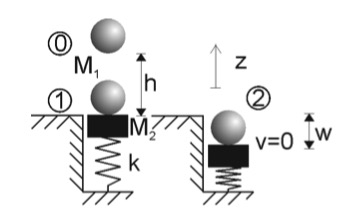
Der geschilderte Fall setzt voraus, dass die kinetische Energie zu Beginn gleich Null ist. Dies ist z.B. nicht der Fall beim Auftreffen fallender Körper, vgl. Folgebild:
Hier ist die die kinetische Energie im Moment des Auftreffens größer als Null. Eine Lösung ergibt sich hier durch Anwendung des Impuls- und des Energiesatzes. Ohne weitere Ableitung (diese findet sich z.B. bei Petersen [2]) ergibt sich, mit u als Auftreffgeschwindigkeit: .
Zwei Grenzfälle sollen das Verhalten verdeutlichen. Wenn die Masse m2 gegen Unendlich geht, erreicht der Vergrößerungsfaktor gerade den Wert 2,0. Wenn m2 gegen Null geht wird der Vergrößerungsfaktor größer als 2. Je nach Fallhöhe kann er sehr große Werte annehmen. Wenn man das Diagramm mit den Stoßfaktoren der unterschiedlichen Kraft-Zeitgesetze anschaut, und die Vergrößerungsfunktion mit der Wurzel hierüber betrachtet, ergeben sich automatisch die Gegenmaßnahme gegen große Stoßwirkungen. Diese besteht in einer Abfederung mit sehr weichen Federn. Im Diagramm in Abbildung 4.34 wird die Schwingzeit T des Systems groß, damit wird der Wert td / T klein, der Vergrößerungsfaktor wird klein, ggf. sogar kleiner als die rein statische Wirkung. Bei fallenden Massen gilt die gleiche Aussage. Eine weiche Feder mit geringem K führt in der Vergrößerungsfunktion zu einem sehr großen Nenner unter dem großen Bruchstrich unter der Wurzel, damit wird der Ausdruck unter der Wurzel klein, die Vergrößerung bleibt gering.
1.2 Anprallasten nach Norm
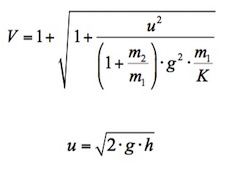
Lasten aus Anprall von Fahrzeugen werden durch statische Ersatzlasten abgebildet. Mit diesen Lasten kann also eine statische Berechnung durchgeführt werden. Alle dynamischen Effekte aus dem Verhalten des Tragwerks sind in der Belastung berücksichtigt. Wie zuvor erläutert, sind die Beanspruchungen beim Anprall jedoch stark von den Steifigkeiten von Tragwerk und Anprallkörper sowie den beteiligten Massen abhängig. Statische Ersatzlasten können demnach nur eine sehr vereinfachte Abbildung für die tatsächliche Beanspruchung sein. Eine Auswahl der nach DIN 1055-9 anzusetzenden statischen Ersatzlasten ist in der Folgetabelle gezeigt.
1.3 Glas-Pendelschlagversuch
Für absturzsichernde Verglasungen verlangt die Bauaufsicht in bestimmten Fällen Versuche, in denen die Eignung der Verglasungskonstruktion für den Lastfall „Anprall von Personen“ nachgewiesen werden muss. Aufgrund des spröden Versagens von Glas ist es wichtig, im Versuch nicht nur die Glasscheibe, sondern die gesamte Verglasungskonstruktion aus Glashalterungen, Profilen etc. mit aufzubauen.
Der Versuch ist stark normiert. Der Personenanprall wird durch einen Massenpunkt mit umgebendem luftgefülltem Reifen (Karre o.ä.) simuliert, Masse und Anhebehöhe des Pendels sind vorgegeben. Vgl. Bild:
1.4 Lasten aus Zugpassage
In der Vergangenheit ist es widerholt zu Schäden an Bauteilen von Schallschutzwänden an Schnell-bahntrassen der Deutschen Bahn AG gekommen. Ursächlich hierfür waren die aerodynamischen Einwirkungen (Druck-Sog-Kräfte) aus dem mit hoher Geschwindigkeit vorbeifahrenden ICE-Zug.
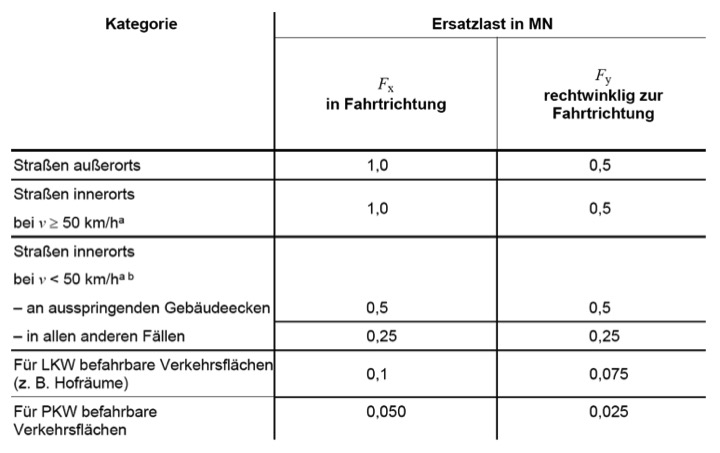
Im Folgebild ist links ein Ausschnitt des gewählten Stabmodells zur Dynamischen Berechnung der Schallschutzwand dargestellt. Die Schallschutzwand selbst besteht aus Sandwichpaneelen, die in den Walzkammern der Stahlprofile befestigt sind. Die Stahlprofile sind in Betonpfähle eingespannt, die als elastische gebettete Stäbe modelliert werden:
Der Zug schiebt am Bug eine Druckwelle vor sich her, die horizontale Belastungen senkrecht zur Schallschutzwand hervorruft, siehe Abbildung oben, rechts. Die Absolutwerte der Drücke sind gegenüber einer natürlichen Windeinwirkung nicht bemessungsrelevant. Jedoch bewegt sich das Lastbild mit der Zuggeschwindigkeit entlang der Schallschutzwand. Das Druckbild ist also als Wanderlast mit einer Geschwindigkeit von 300km/h anzusehen.
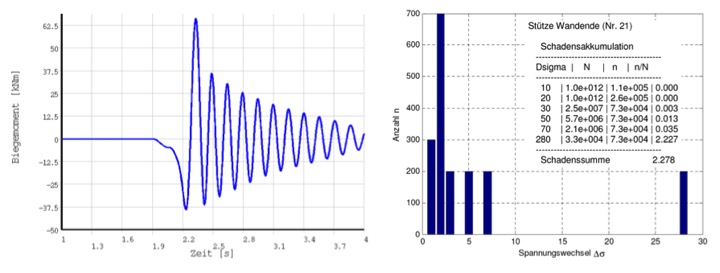
In einer aufwändigen numerischen Untersuchung wurden die Beanspruchungen der Schallschutzwand mittels einer dynamischen Berechnung bestimmt. Hierbei mussten z.B. auch die Bodenparameter für die angenommene elastische Bettung variiert werden. In der folgenden Abbildung ist ein Berechnungergebnis dargestellt.
Das Biegemoment an der Einspannstelle des Stahlträgers ist nach der dynamischen Berechnung um den Faktor 4 größer als bei Annahme einer statischen Einwirkung des Lastbildes aus der Druckwelle. Zusätzlich treten bei jeder Zugpassage mehrere Lastwechsel auf, so dass bei 100 Zugpassagen am Tag letztendlich ein Ermüdungsbruch nach kurzer Zeit die Folge war.
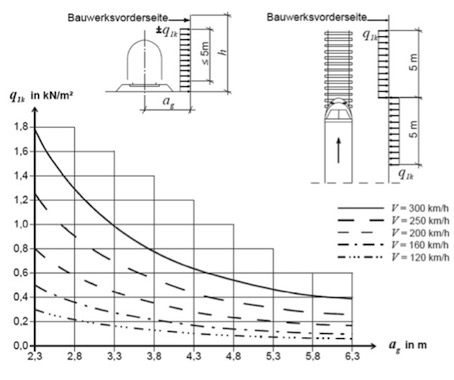
Die in Abhängigkeit der Zuggeschwindigkeit anzusetzenden Lasten sind im DIN Fachbericht 101 geregelt, siehe Folgebild. Es wird dort auch explizit dort auch explizit darauf hingewiesen, dass mit diesem Lastbild dynamische Berechnungen durchzuführen sind und es sich hierbei nicht um statische Ersatzlasten handelt. Eine Banalität eigentlich, dennoch haben viele Entwerfer nach dem Vergleich der Druck-Soglasten mit den regulären Windlasten, diesen Einwirkungsfall nicht weiter untersucht.
1.1 Allgemeines
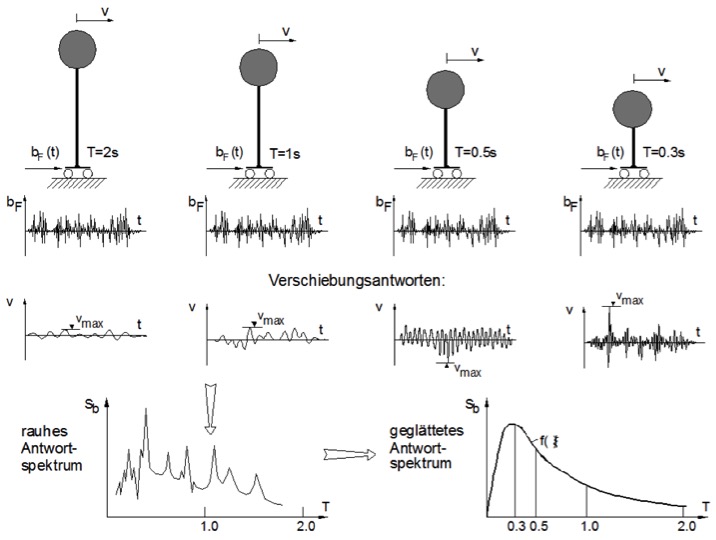
Wenn der Zeitverlauf der Bodenbeschleunigungen bekannt ist, kann mit Hilfe einer Zeitverlaufsberechnung die zugehörige Antwort des Tragwerks auf diese Bodenbeschleunigungen bestimmt werden, siehe Schlusskapitel 5.3 in Grundlagen. Da der genaue Verlauf der (zukünftigen) Bodenbeschleunigungen am Bauwerksort naturgemäß nicht bekannt ist, behilft man sich so, dass für die gegebene Untergrundsituation eine Anzahl typischer Verläufe vorgegeben wird. Das Tragwerk wird der Reihe nach mit allen vorgegebenen Beschleunigungsverläufen berechnet. Bemessen wird nach dem Maximalwert der betrachteten Antwortgröße aller Antwort-Zeitverläufe (Antwortspektrenverfahren). Zur Bestimmung eines Antwortspektrums wird ein Einmassenschwinger mit definierter Masse, Steifigkeit und Dämpfung (und damit definierter Eigenfrequenz) einem vorgegebenen Fußbeschleunigungsverlauf unterworfen. Die zeitliche Antwort wird z.B. mit Hilfe eines Zeitschritt-Verfahrens ermittelt und der jeweilige Maximalwert der Antwort aus dem Antwort-Zeitverlauf abgegriffen. Durch Variation der Systemwerte des Einmassenschwingers ergeben sich (bei stets derselben Erregung) unterschiedliche maximale Antworten. Alle maximalen Antworten werden in einem sog. Antwortspektrum über der Schwingzeit T aufgetragen (Folgebild). Man beachte, dass die Information, zu welchem Zeitpunkt der Maximalwert aufgetreten ist, im Antwortspektrum verloren gegangen ist.
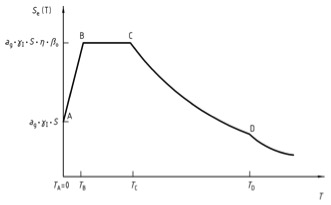
Die Berechnung wird bei Mehrmassensystemen in der Regel mit Hilfe der FE-Methode durchgeführt. Üblicherweise wird hierbei nicht mit den absoluten Verschiebungen gearbeitet, sondern mit den relativen Verschiebungen des Tragwerkes gegenüber den Bodenverschiebungen, vgl. Abschn. 2.10. Das Antwortspektrum hängt naturgemäß stark von den Zufälligkeiten des zugrunde gelegten Be-schleunigungsverlaufs ab und weist deshalb einen sehr rauhen Verlauf mit vielen Spitzen und Tälern auf. Durch Berechnung mit unterschiedlichen Beschleunigungsverläufen und Mittelung und Glättung erhält man glatte Entwurfsantwortspektren, wie in Abbildung 4.41 angegeben. Die Antwortspektren sind abhängig von der angesetzten Tragwerksdämpfung, diese ist deshalb mög-lichst zutreffend zu bestimmen. Teilt man die Ordinaten des Antwortspektrums durch einen fest vor-gegebenen Maximalwert, so erhält man ein normiertes Bemessungsspektrum. Wenn dieses noch weiter vereinfacht wird, erhält man das Antwortspektrum der DIN 4149, welches so auch im Nationalen Anhang des EC8 zu finden ist. Dieses ist in Bild 4.7 dargestellt. .
Die Antworten infolge einer Erdbebeneinwirkung werden durch nichtlineare Einflüsse, z.B. durch Plastizieren stark reduziert. Um nichtlineare Berechnungen bei der Ermittlung des Antwortspektrums zu vermeiden, kann nach DIN 4149 das Antwortspektrum durch Division mit sog. Verhaltensfaktoren reduziert werden. Dies ist jedoch nur erlaubt, wenn auch ausreichende Verformungsmöglichkeiten bestehen. Auf weitere Einzelheiten kann hier nicht eingegangen werden, es wird auf das einschlägige Fachschrifttum verwiesen. Wenn die Berücksichtigung nur der Grundschwingung auf der Basis des generalisierten Einmassen-schwingers nicht mehr ausreicht, kann z.B. eine Berechnung nach dem Konzept der modalen Analyse durchgeführt werden. Hierbei werden die Antworten von n generalisierten Einmassenschwingern getrennt ermittelt und anschließend addiert. Wenn die maximalen Antworten der Ein¬massen-schwinger mit Hilfe des o.a. Antwortspektrums ermittelt werden, lassen sich die Antworten nicht mehr einfach addieren, da sie zu unterschiedlichen Zeitpunkten auftreten und die Zeitinformation bei der Aufstellung der Antwortspektren verloren gegangen ist. Wenn die Eigenfrequenzen gut ge-trennt sind, wird die Gesamtantwort i. Allg. mit Hilfe einer geometrischen Addition ermittelt, dies lässt sich auch nach der Zufallstheorie begründen: .
Bei eng benachbarten Eigenfrequenzen können die Antworten zeitgleich, d.h. in Phase auftreten. Die Antworten dieser Einmassenschwinger werden dann i. Allg. auf sicherer Seite absolut addiert.
1.2 Einführungsbeispiel: Gebäude unter Erdbebeneinwirkung
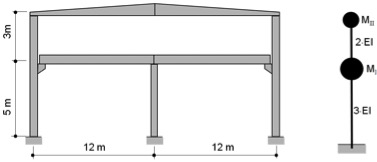
Für eine Feuerwehr ist der Neubau eines Feuerwehrgerätehauses geplant. Das Gebäude besitzt Schulungs-, Büro und Mannschaftsräume im Obergeschoss sowie Stellplätze für Einsatzfahrzeuge im Erdgeschoss. Das Tragwerk besteht aus eingespannten Stahlbetonstützen aus C30/37, auf die Fertigteilbinder aus Spannbeton aufgelegt werden. Das Dach ist mit 2,5° flach geneigt In der Abbildung 4.43 ist der Querschnitt des Gebäudes skizzenhaft dargestellt. Die Dämpfung kann mit 5% angenommen werden.
Der Abstand der Stützen in Bauwerkslängsrichtung beträgt 6m. Für das Bauwerk sollen die Einwirkungen aus Erdbeben nach DIN EN 1998-1 bestimmt werden, wobei in diesem Beispiel nur die horizontalen Eiwirkungen in Querrichtung des Gebäudes berücksichtigt werden. Der Baugrund besteht aus einer dichtgelagerten Kiesschicht.
1.2.1 Modellbildung
Da die mittlere Stütze nicht vom Fundament bis zum Dach durchläuft, ist der Aufriss als unregelmäßig einzuordnen. Der Grundriss jedoch sei regelmäßig, so dass nach DIN EN 1998-1 ein ebenes Modell für jede Hauptrichtung (Längs und Quer) ausreichend ist. Allerdings ist eine Berechnung als Einmassenschwinger nicht mehr möglich, da die Massen nur in den Deckenscheiben zusammengefasst werden dürfen. Das dynamische Tragverhalten für die horizontalen Erdbebeneinwirkungen wird deshalb durch das in der oberen Abbildung, rechts dargestellte System eines 2-Massen-Schwingers beschrieben. Es darf zwar nach EC8 eine vereinfachte linear-elastische Berechnung durchgeführt werden, jedoch ist die Antwort beider Eigenformen des Tragwerks auf das Erdbeben zu berücksichtigen. Der Steifigkeitsabfall durch Rissbildung darf vereinfachend durch eine Abminderung der elastischen Steifigkeiten auf die Hälfte berücksichtigt werden. Eine Variation des statischen E-Moduls ist nicht vorgesehen. Es wird angesetzt:
Wegen der günstigen Wirkung der Normalkräfte auf die Biegesteifigkeit wird für die Stützen des EG der dreifache Wert der Biegesteifigkeit und für die Stützen des OGs der doppelte Wert angesetzt.
Bauteil
Masse [to/m]
Dachbinder einschl. Abdichtung und Ausbau:
1,3
EG-Decke einschl. Ausbau:
1,9
Stützen: 2,5 t/m^3 x 0,40m x 0,40m
0,4
Zusätzlich müssen ggf. Massen aus veränderliche Lasten, also z.B. Verkehrs- und Schneelasten berücksichtigt werden. Diese sind gemäß DIN EN 1998-1 unter Berücksichtigung spezieller Kombinationsbeiwerten für Erdbeben anzusetzen: .
mit dem Kombinationsbeiwert Ψ2,i nach DIN EN 1990 ergibt sich:
Für die Deckenscheibe im 1. OG ergibt sich die Stockwerksmasse nach der folgenden Tabelle:
Bauteil
Masse [to]
Stützen außen
2 x 0,40t x (5,0m/2 + 3,0m/2)
3,2
Stützen innen
1 x 0,4t/m x (5,0m/2)
1,0
EG-Decke
1,9 t/m x 24m
45,6
Verkehr
0,126t/m^2 x 24m x 6m
18,1
m1=
67,9
Die Stockwerksmassen für das 2. OG (Dach) sind in der nächsten Tabelle zusammengestellt. Hierbei muss auch die evtl. vorhandene Masse aus Schnee berücksichtigt werden. Die Regelschneelast von 85 kg/m² darf mit dem vorstehenden Kombinationsbeiwert 0,5 abgemindert werden: .
Bauteil
Masse [to]
Stützen
2 x 0,40t x 3,0m/2
1,2
Dach
1,3t/m x 24m)
31,2
Schnee
0,034t/m^2 x 24m x 6m
4,9
m2=
37,3
1.2.2 Eigenfrequenzen
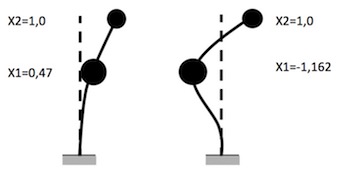
Die Eigenfrequenzen des 2-Massen-Schwingers nach Abbildung 4.43 mit einer Handrechnung zu bestimmen ist vergleichsweise aufwendig. Aus diesem Grund ist dieses Modell in den StTools verfügbar. Es ergeben sich die folgend dargestellten Eigenformen. Die Eigenfrequenzen ergeben sich zu: f1 = 0,53 Hz, f2 = 3,00 Hz .
1.2.3 Erdbebeneinwirkung
Die statische Ersatzkraft infolge Erdbeben wird für jede der beiden Eigenformen getrennt berechnet. Es werden also zunächst gedanklich zwei unabhängige Einmassenschwinger, einer mit der Frequenz 0,53 Hz und einer mit der Frequenz 3,0 Hz betrachtet. Die Gesamterdbebenersatzkraft ergibt sich mit der zur jeweiligen Eigenfrequenz gehörenden Ordinate des Antwortspektrums Sd:
Hierbei ist m die Gesamtmasse des Bauwerks oberhalb des Fundaments und T die Eigenperiode des Tragwerks in der betrachteten Schwingungsform. Es gilt bekanntlich, siehe Grundlagen: T = 1 /f. Der Korrekturbeiwert λ ist in diesem Fall 1,0.
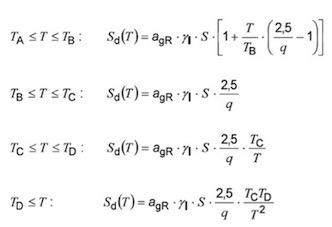
Zunächst ist die Funktion des Antwortspektrums zu bestimmen. Das dieses die Schwingungsantwort eines Tragwerks auf ein Erdbeben am Bauwerksstandort repräsentiert, müssen hier alle Standortspezifischen Parameter des Erdbebens mit einfließen. Dies sind
Baugrund (Parameter TB, TC, TD) und Untergrund (Parameter S)
Erdbebenzone (Bodenbeschleunigung agR)
Ebenso müssen im Antwortspektrums Fähigkeiten des Bauwerks zur Energiedissipation enthalten sein. Dies sind
Bauwerksdämpfung (Korrekturbeiwert μ)
Möglichkeit zur Ausbildung von Fließgelenken (Verhaltensbeiwert q)
Die zulässige Schädigung eines Bauwerks durch ein Erdbeben wird mit einem Vergrößerungsfaktor (Bedeutungsbeiwert γI) auf Seite der Einwirkung berücksichtigt.
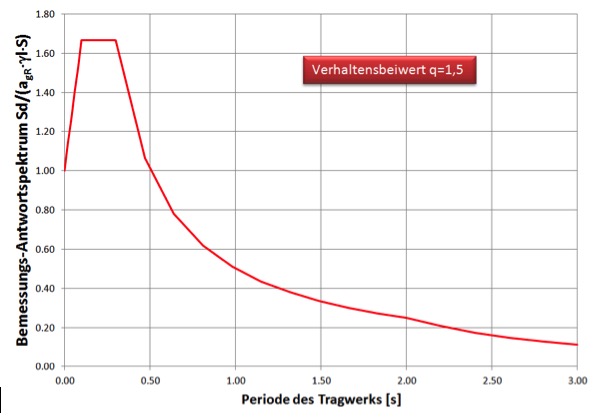
Im folgenden Bild ist das ANtwortspektrum nach EC 8 dargestellt:
Das Diagramm ist einer Präsentation entnommen, bei der durch Anklicken des roten Buttons unterschiedliche Verhaltensbeiwerte ausgewählt werden können. Die Kurve ändert sich jeweils entsprechend.
Detailkarten für die Erdbebenzonen und die Untergrundklasse sind unter www.dibt.de¬/de¬/Data¬/TB-/Zuordnung_der_Erdbebenzonen.xls erhältlich. Allerdings nur für wenige Bundesländer. Unter der Adresse https://www.gfz-potsdam.de gibt es eine Online Datenbank über die jedem Ort Erdbebenzonen und Untergrundklassen zugeordnet werden können. Unser Bauwerk befinde sich in der Erdbebenzone 3, hier ist eine horizontale Bodenbeschleunigung von Aufgrund der Nutzung als Feuerwache muss das Bauwerk auch im Erdbebenfall funktionstüchtig sein. Das Bauwerk ist deshalb nach DIN EN 1998-1 als Gebäude des Katstrophenschutzes in die Bedeutungskategorie IV einzuordnen. Der Bedeutungsbeiwert hierfür ist: .
Die Untergrundklasse am Bauwerksstandort kann aus einen Karte im Nationalen Anhang entnommen werden. Eine genauere Zuordnung mit der o.g. Homepage ergibt eine Untergrundklasse T. Der vor-handene Baugrund (sehr dichter Kies) gehört zur Baugrundklasse B. Hieraus ergeben sich die sog. Kontrollperioden des Bemessungsantwortspektrums:
Der Verhaltensbeiwert q berücksichtigt die Fähigkeit des Tragwerks Energie aufgrund horizontaler Erdbebeneinwirkung zu dissipieren. Der Verhaltensbeiwert für dieses Beispiel beträgt .
Hierin ist der Einfluss der Dämpfung bereits enthalten. Zur Bestimmung des Verhaltensbeiwertes sei auf EC8 verwiesen. Das mit diesen Parametern bestimmte Bemessungs-Antwortspektrum ist im o.a. Bild links dargestellt. Für die 1. Eigenform mit T1=1/f1=1,89 Sekunden ergibt sich:
und für die 2. Eigenform mit T2=1/f2=0,33 Sekunden .
1.2.4 Erbebenkräfte
Da die unterschiedlichen Schwingungsformen nicht alle den gleichen Anteil an der Erdbebenbeanspruchung haben, sind die Erdbebenkräfte noch mit einem modalen Beteiligungsbeiwert zu wichten. Dieser lässt sich einfach aus der Eigenform in der o.a. Abbildung und den Stockwerksmassen berechnen. Allgemein ist der modalen Beteiligungsbeiwert wie folgt definiert: .
Hierbei ist N die Anzahl der Stockwerke und mj die Stockwerksmasse. Für die jeweilige Eigenform ergibt sich .
Für Hintergründe sei an dieser Stelle auf die Spezialliteratur verwiesen.
Die Gesamt-Erdbeben-Ersatzkraft gibt sich aus der Wichtung mit diesen Beteiligungsbeiwerten. Die Gesamtkraft ist dann proportional zur Stockwerksmasse auf die Stockwerke zu verteilen und mit den Ordinaten der Eigenform zu wichten. Es ergeben sich die statischen Ersatzlasten aus Erdbeben allgemein nach .
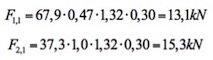
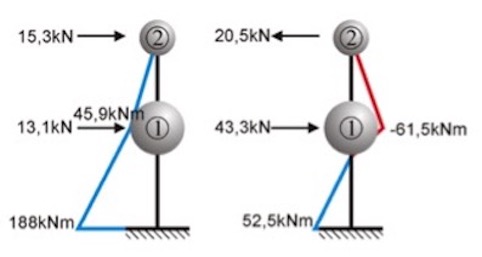
Für die 1. Eigenform ergeben sich damit folgende Ersatzerdbebenkräfte für jedes Stockwerk:
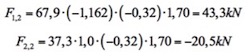
Für die 2. Eigenform ergibt sich: .
Die horizontalen Kräfte und die zugehörigen Biegemomente sind in der o.a. Skizze eingetragen.
1.2.5 Bemessungsschnittgrößen
Da ein gleichzeitiges Auftreten der maximalen Schnittgrößen aus den beiden Eigenformen sehr unwahrscheinlich ist, sofern die beiden Eigenfrequenzen weit genug auseinander liegen, dürfen die Beanspruchungen quadratisch addiert werden. Bedingung hierfür ist, dass: .
Dies ist in diesem Beispiel der Fall, so dass das maximale Moment aus Erdbeben in Höhe des 1. Stockwerkes:
und in Höhe des Fundamentes:
beträgt.

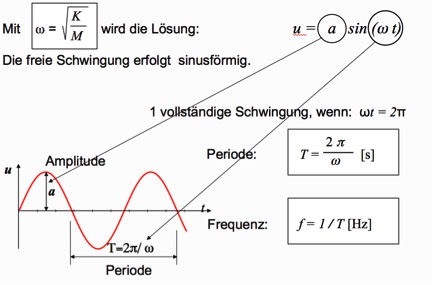
 ist die Eigenfrequenz. Sie ist als sog. Kreisfrequenz gegeben. D.h. es wird gezählt, wieviel Bogenlänge je Zeiteinheit beim Einheitskreis überstrichen wird. Dimension ist 1/Sekunde. Im Bauwesen ist das Arbeiten mit der sog. Frequenz üblich. Diese ergibt sich aus der Kreisfrequenz durch Multiplikation mit 2pi. Dimension ist Hertz, kurz Hz. Sie gibt an die Anzahl der Schwingungen pro Sekunde.Wenn der Einheitsvektor einmal umgelaufen ist, hat er die Strecke 2pi überstrichen, dann geht der Prozess von neuem los:
ist die Eigenfrequenz. Sie ist als sog. Kreisfrequenz gegeben. D.h. es wird gezählt, wieviel Bogenlänge je Zeiteinheit beim Einheitskreis überstrichen wird. Dimension ist 1/Sekunde. Im Bauwesen ist das Arbeiten mit der sog. Frequenz üblich. Diese ergibt sich aus der Kreisfrequenz durch Multiplikation mit 2pi. Dimension ist Hertz, kurz Hz. Sie gibt an die Anzahl der Schwingungen pro Sekunde.Wenn der Einheitsvektor einmal umgelaufen ist, hat er die Strecke 2pi überstrichen, dann geht der Prozess von neuem los:

 lässt sich auch wie folgt formulieren:
lässt sich auch wie folgt formulieren:  ,
,
 der Erregerfrequenz zur Eingenfrequenz. Durch die Invertierung der Achsbezeichnung in der rechten Hälfte gelingt es, die Kurven
der Erregerfrequenz zur Eingenfrequenz. Durch die Invertierung der Achsbezeichnung in der rechten Hälfte gelingt es, die Kurven  =0 auf Null herunterzuziehen und die Funktion dort zu beenden. Wenn, wie oft, der linke Parameter
=0 auf Null herunterzuziehen und die Funktion dort zu beenden. Wenn, wie oft, der linke Parameter  .
. .
. . Überprüfungg des Diagramms auf richtige Maximalwerte: z.B:
. Überprüfungg des Diagramms auf richtige Maximalwerte: z.B:  . Ok!
. Ok!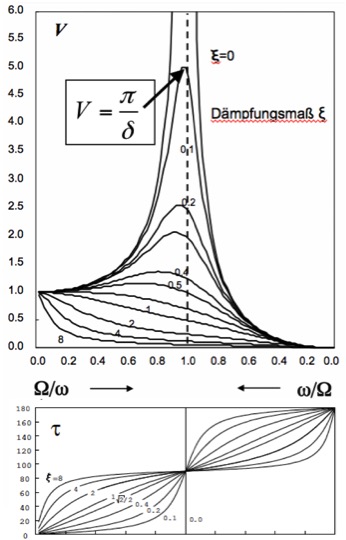
 <0.6 ): Das Tragwerk hat hohe Eigenfrequenzen, die Erregerfrequenzen sind damit verglichen niedrig, die Krafteinwirkungen erfolgen relativ langsam, d.h. quasistatisch. Die Massen- und Dämpfungskräfte sind klein.
<0.6 ): Das Tragwerk hat hohe Eigenfrequenzen, die Erregerfrequenzen sind damit verglichen niedrig, die Krafteinwirkungen erfolgen relativ langsam, d.h. quasistatisch. Die Massen- und Dämpfungskräfte sind klein.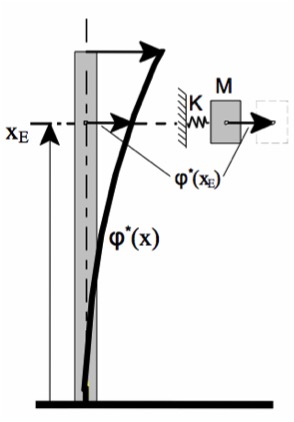
 .
. . Dabei ist m die verteilte Masse und M je eine Einzelmasse.
. Dabei ist m die verteilte Masse und M je eine Einzelmasse. .
.
 .
.
 . Für die Erfassung der verteilten Masse muss also lediglich über das Quadrat der dreiecksförmige Eigenschwingform integriert werden. Hierfür nutzen wir die ∫M ×M ×dx Tabellen (Faktor Dreieck-Dreieck: 1/3). Es wird nur über die halbe Länge integriert, der Faktor 2 sorgt für Ausgleich:
. Für die Erfassung der verteilten Masse muss also lediglich über das Quadrat der dreiecksförmige Eigenschwingform integriert werden. Hierfür nutzen wir die ∫M ×M ×dx Tabellen (Faktor Dreieck-Dreieck: 1/3). Es wird nur über die halbe Länge integriert, der Faktor 2 sorgt für Ausgleich: .
.
 .
.


 .
. .
. .
. .
.
 .
. .
. .
.
 .
. phasenrichtig überlagert werden.
phasenrichtig überlagert werden.  .
. .
.

 .
.
 .
. .
. .
.
 .
.

 .
. .
.
 .
.
 .
.
 Aufgrund der Nutzung als Feuerwache muss das Bauwerk auch im Erdbebenfall funktionstüchtig sein. Das Bauwerk ist deshalb nach DIN EN 1998-1 als Gebäude des Katstrophenschutzes in die Bedeutungskategorie IV einzuordnen. Der Bedeutungsbeiwert hierfür ist:
Aufgrund der Nutzung als Feuerwache muss das Bauwerk auch im Erdbebenfall funktionstüchtig sein. Das Bauwerk ist deshalb nach DIN EN 1998-1 als Gebäude des Katstrophenschutzes in die Bedeutungskategorie IV einzuordnen. Der Bedeutungsbeiwert hierfür ist:  .
.
 .
.
 .
. .
. .
. .
.
 .
.
 .
.
