Hierunter werden hier Maßnahmen verstanden, bei denen die Dämpfuzngsgeräte nicht mehr rein passiv arbeiten, sondern bei denen während der SChwingung Parameter veröändert werden, um zu einer optimalen Schwingungsdämpfung zu kommen.
Dämpfer die während des Betriebes in ihrem Vergalten geändert werden, z.B. durch Änderung der Kolbendurchströmfläche, wodurch die Viskosität des Dämpfers geändert wird, werden hier als Aktive Dämpfer bezeichnet, obwohl es durchaus andere Festlegungen gibt, die solche Dämpfer z.B. als semiactiv bezeichnen. Unter aktiven Dämpfern wird dort die gezielte Aufbringungen von Öldruck verstanden, wodurch eine Kraft ausgeübt werden kann.
Unter Semi-Aktiven Dämpfuzngssystemen versteht man den Einsatz von Dämpfungselementen, deren Dämpfungseigenschaften, d.h. in der Regel die Dämpfungskonstante mit Hilfe einer Regelung optimal an die Notwendigkeiten angepasst werden können. Dies setzt naturgemäß stets das Vorhandensein eiens Computers zur Regelung voraus. Dieser kann als ggf. eine Kleinstausführung (Raspberry Pi oder Aduino) oder ein PC oder eine Zwischenlösung sein. Vorausgesetzt ist dabei immer, dass eine Stromversorgung vorhanden ist. Da dies im Katastrophenfall nicht immer gewährleistet sein wird, muss man über das Verhalten anchdenken, wenn der Strom ausfällt. Wichtig ist dabei das sog. fail-safe Verhalten, d.h. die Systeme müssen bei Stromausfall automatisch in einen sicheren zustand gehen, d.h. z.B. maximale oder mittlere Dämpfung o,ä.
Bei den semi-activen Maßnahmen handelt es sich in der Regel um die Verwendung von Dämpfern, deren Eigenscxhaften (meist die Dämpfunsgkonstante) aktiv beeinflusst werden kann. So kann für jede Art von Erregung die genau passende Dämpferkonstante eingestellt werden. Vhl. dazu die Formel (8) in Abs. 3.4.
In Bild 20 ist der Einsatz eines solchen Dämpfertyps gezeigt. Im linken Bild ist die reale Ausführung skizziert, im rechten Teil das zugehörige vereinfachte mechanische Modell. Das Feder-Dämpfer-Modell ist ein sog. Maxwell-Dämpfer (d.h. Serienschaltung von Feder und Dämpfer). Die Feder des Maxwell-Modells besteht hier aus den beiden Diagonalen, die dazu dienen, die Inter-Geschosskraft vom oberen auf das untere Geschosss zu übertragen. Diese Kraft soll weitmöglichst dissipiert werden. Natürlich kann die Dämpferanordnung auch symmetrisch ausgeführt werden, aber zum Verständnis ist einer ausreichend [Kurino, 2003].
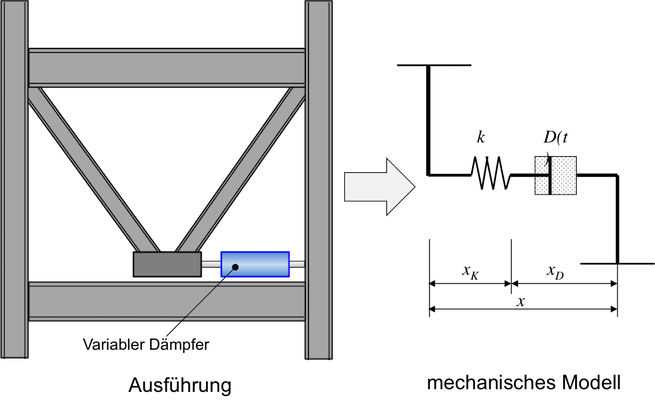 Bild 20: Reales System und mechanisches Modell eines Stabwerkes mit semi-aktivem Dämpfer
Bild 20: Reales System und mechanisches Modell eines Stabwerkes mit semi-aktivem Dämpfer
Bevor wir das semi-aktiv gedämpfte System behandeln, sollen einieg Worte zum rein visco-elastisch-plastischen Dämpfer gesagt werden, d.h. ein Dämpfer, dessen Dämpofungswert D(t) nicht zeitveränderlich, also konstant ist. Bei Aufprägung einer veränderlichen Verschiebung ergibt sich die gesamt Verschiebungsgeschwindigkeit aus der Summe der rein elastischen Verschiebung der Feder und der Verschiebung des Dämpfers. Zur Größe der Dämpferkraft siehe Grundlagen. Es gilt:
 ….. (11).
….. (11).
Wenn der Dämpferwert sehr groß wird, spielt der zweite Term keine Rolle mehr, er widr immer kjleiner, d.h. die gesamte Verschiebung wird rein elastisch in der Feder ablaufen. Bei sehr kleinen Dämpferwerten wird der rechte Anteil dagegen sehr groß, d.h. die Gesamtverschiebung und die zugehörige Geschwindigkeit findet weitestgehend im Dämpfer statt, es wird kaum eine Widerstandskraft geweckt. Die optimale Dämpfung ist offenbar dann geweckt, wenn die Energie-Dissipation maximal wird.

Bild 21: Kraft-Verschiebungsbeziehungen passiver Dämpfer unter harmonischer Erregung 
Die Energie-Disspipation kann, ausgehend von Gl. (1), leicht bestimmt werden, vgl. [Kurino, 2003].:
 ….. (12)
….. (12)
Die Kreisfrequenz omega in Gl (2) ist nicht die (unterste) Kreiseigenfrequenz, sondern die Frequenz, mit der das System in Resonanz erregt wird, also auch eine Eigenfrequenz, aber eben nur die, die in Resonanz erregt wird.
Die dissipierte Energie per Zyklus wird durch den imaginären Teil in Gleichung (2) bestimmt:
 ……(13)
……(13)
Im Folgenden soll das Dämpfungsverhalten eines einfachen Schwingers mit einem Freiheitsgrad betrachtet werden, also z.B. ein Schwinger mit einer generalisierten Masse und Steifigkeit:
Weiter
einfaches Einfreiheitsgradsystem (SDOF) erweitert wird, ergibt sich nach einigen Zwischenrechnungen die optimale Dämpferkonstante:
 ……(15)
……(15)
Darin ist alpha das Verhältnis der Steifigkeit des gesamten Maxwell-Dämpfers zur Systemsteifigkeit des Einfreiheitsgrad-Systems:
 ……(16)
……(16)
Den Hartog, J.P. (1952): Mechanische Schwingungen. Berlin, Göttingen, Heidelberg: Springer 1952.
Peil,U. (1993): Baudynamik. In: Stahhlbau Handbuch,Band I Teil A. Stahlbau-Verlagsgesellschaft mbH, Köln.
Petersen,C. (1996): Dynamik der Baukonstruktionen. Friedr. Vieweg&Sohn, Braun-schweig, Wiesbaden, 1996.
Petersen,C. (2001): Schwingungsdämpfer im Ingenieurbau. Herausgeber: Firma Mauer und Söhne, GmbH und Co KG, München.
Kurino,H., J. Tagami, K.Shimizu,T.Kobori: Switching Oil Damper with built in controllere for structural control. Journ. of Struct. Eng, AASCE, Juky 2003, p.895-304.
Hierbei wird einerseit die passive Dämpfung genutzt, andererseits aber auch zusätzlich in den Prozess eingegriffen.
Aktive Tilger werden durch am Ort der größten Verschiebung – bei Hochhäusern also an der Spitze – eingebaute allseits verschiebliche schwere Massen verstanden. Die Massen müssen nicht zwangsläufig federnd mit der Struktur verbunden werden.
Die Massen sind beim Aktiven Tilger jedoch mit Hydropulsern (geregelte hydraulische Pressen) mit dem Bauwerk verbunden. Nimmt ein am Kopf installierter Sensor eine Beschleunigung oder eine Verschiebung des Bauwerkes auf, treten die Hydropulser phasenversetzt in Aktion. D.h. anschaulich gesprochen, wird die Trägheit der Zusatzmasse genutzt, damit sich der oder die Hydropulser an der Masse festhalten können. Schwingt das Bauwerk nach rechts, wird die Masse aufgrund ihrer Trägheit weitgehend am alten Ort verbleiben, wenn der Hydropulser zu macht, d.h. seine inneren Ventile schließt, hält sich das Bauwerk direkt an der Masse fest. Wenn der Hydropulser die Bewegung – durch Öffnen der inneren Ventile zulässt, wird sich der Kolben nach rechts verschieben. Wenn nunmehr rechts vomn Kolben Öl eingepresst wird – das ist im Bild rot dargestellt – (das geht nur mit leistungsstarken Ölpumpen) wird der Kolben nach links bewegt, d.h. der Hydropulser zieht das Bauwerk wieder in die Ausgansglage zurück. Es entsteht eine Kraft F, die von der Größe der Masse M und von der Geschwindigkeit, mit der das Öl eingepresst wird, abhängt, vgl. Bild 2.
Wenn die Masse an den Anschlag stößt, entsteht eine der Bewegung entgegengesetzet Kraft, die ebenfalls günstig, d.h. schwingungsreduzierend wirkt.

Bild 2: Prinzip der Aktiv-Tilger Wirkung